27 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
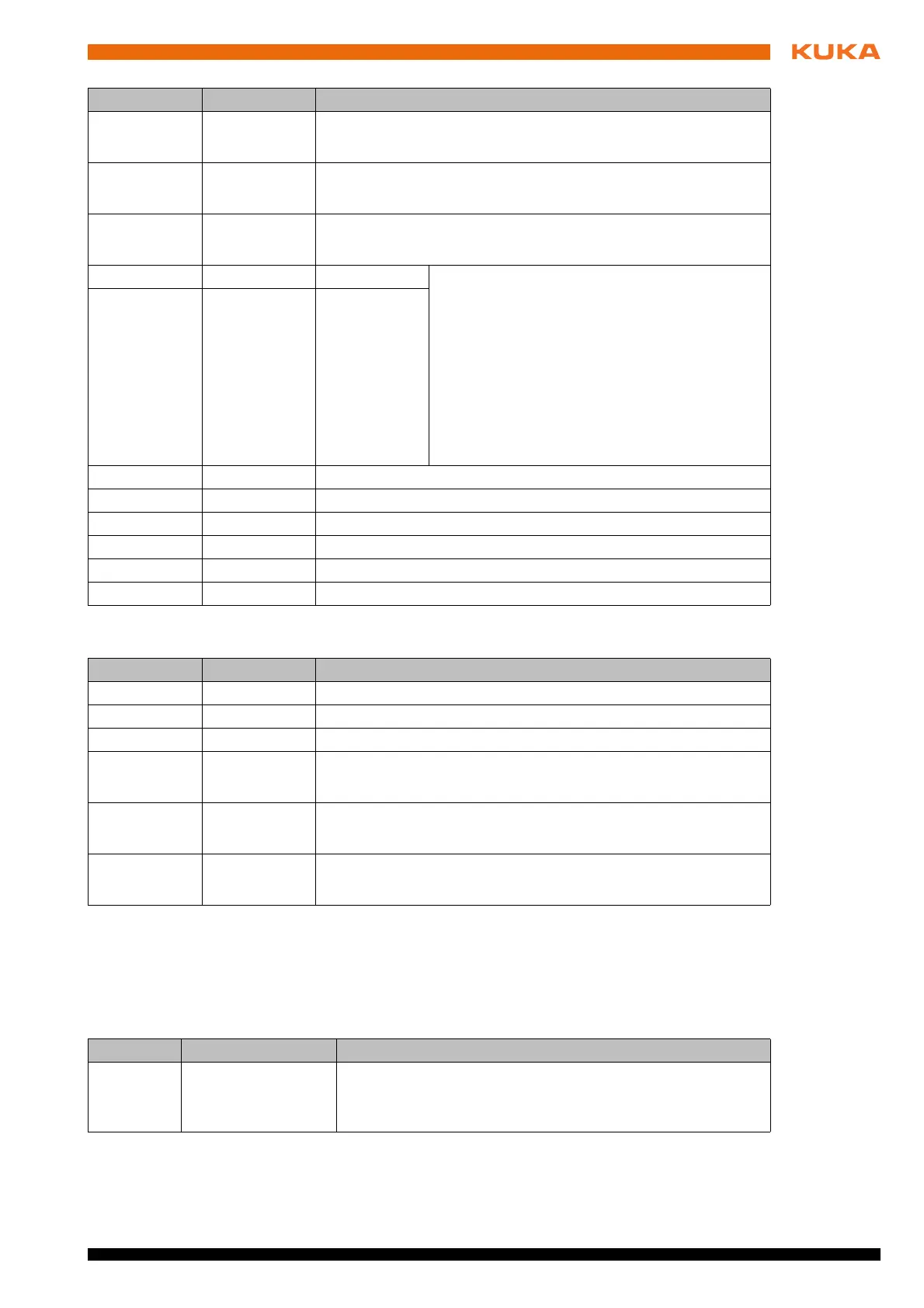
FRAME Space coordinates and orientation for the TOOL or BASE coordinate system
7.4 Integer variables
Some of the integer variables used in the function blocks are described below.
BufferMode Mode in which a statement is executed on the robot controller
A REAL Rotation about the Z axis
-180° … +180°
B REAL Rotation about the Y axis
-180° … +180°
C REAL Rotation about the X axis
-180° … +180°
S INT Status The position (X, Y, Z) and orientation (A, B, C)
values of the TCP are not sufficient to define
the robot position unambiguously, as different
axis positions are possible for the same TCP.
Status and Turn serve to define an unambigu-
ous position that can be achieved with different
axis positions.
Note: Further information about Status and
Turn is contained in the “Operating and Pro-
gramming Instructions for System Integrators”.
TINTTurn
E1 REAL Position of external axis E1 (optional), (unit: mm or °)
E2 REAL Position of external axis E2 (optional), (unit: mm or °)
E3 REAL Position of external axis E3 (optional), (unit: mm or °)
E4 REAL Position of external axis E4 (optional), (unit: mm or °)
E5 REAL Position of external axis E5 (optional), (unit: mm or °)
E6 REAL Position of external axis E6 (optional), (unit: mm or °)
Element Type Description
Element Type Description
X REAL Offset in X direction (unit: mm)
Y REAL Offset in Y direction (unit: mm)
Z REAL Offset in Z direction (unit: mm)
A REAL Orientation of the Z axis
-180° … +180°
B REAL Orientation of the Y axis
-180° … +180°
C REAL Orientation of the X axis
-180° … +180°
Value Name Description
0 DIRECT The statement is executed directly by the Submit interpreter
(Submit program).
Note: This mode is not available for certain function blocks.
 Loading...
Loading...