26 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
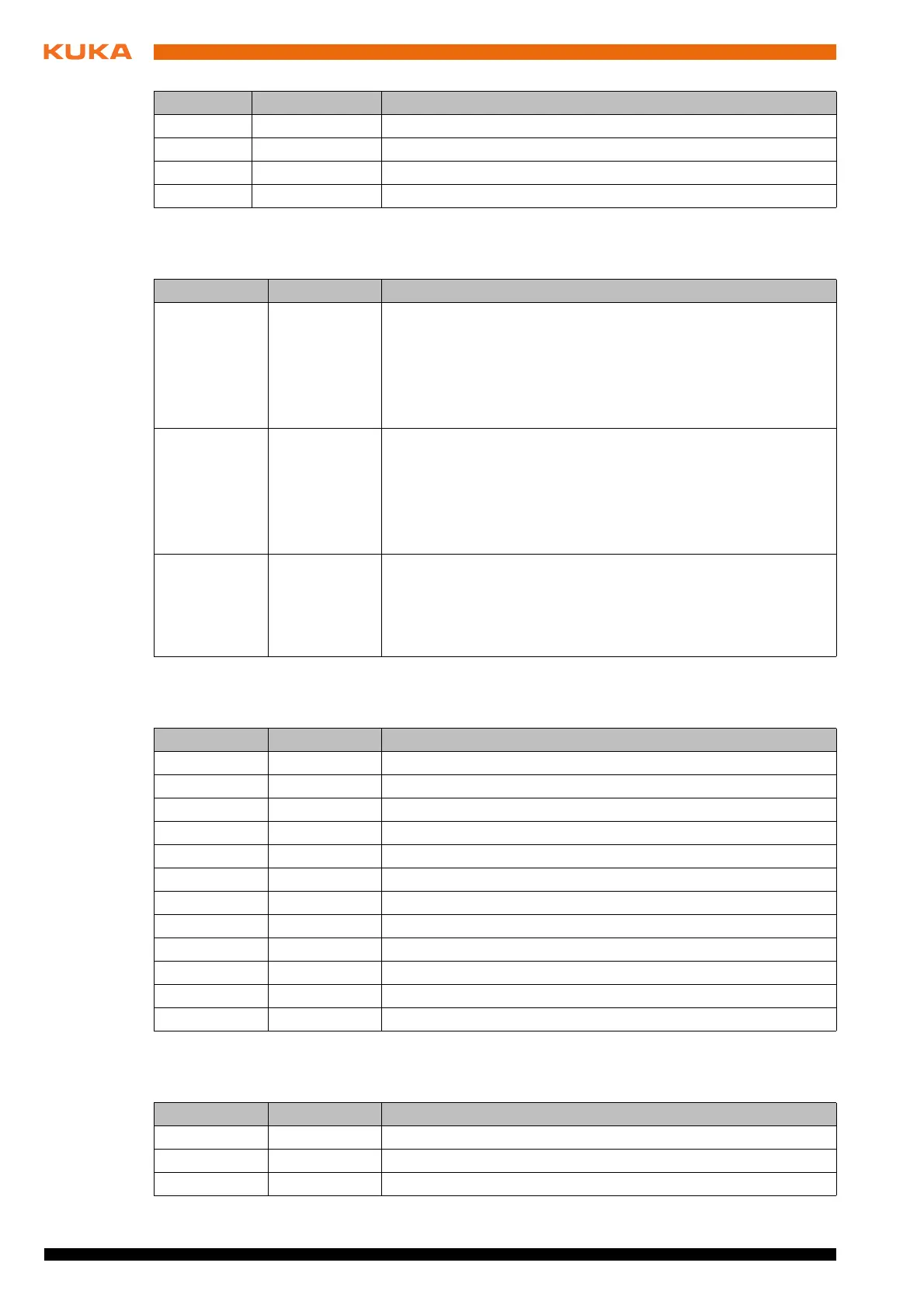
COORDSYS Coordinate system to which the Cartesian coordinates of the end position refer
in a KRC_Move or KRC_Jog motion command
E6AXIS Angular values or translation values of the axes in an axis group for a
KRC_MoveAxis motion command
E6POS Cartesian coordinates of the end position for a KRC_Move or KRC_Jog mo-
tion command
Value Name Description
0 – Without approximate positioning (default)
1 C_DIS Approximate positioning with distance parameter
2 C_ORI Approximate positioning with orientation parameter
3 C_VEL Approximate positioning with velocity parameter
Element Type Description
Tool INT Number of the TOOL coordinate system
-1: coordinate system is not changed
0: NULLFRAME
1 … 16: TOOL_DATA[1 … 16]
Default: -1
Base INT Number of the BASE coordinate system
-1: coordinate system is not changed
0: NULLFRAME
1 … 32: BASE_DATA[1 … 32]
Default: -1
IPO_MODE INT Interpolation mode
0: The tool is a fixed tool (#BASE).
1: The tool is mounted on the mounting flange (#TOOL).
Default: 0
Element Type Description
A1 REAL Position of robot axis A1 (unit: mm or °)
A2 REAL Position of robot axis A2 (unit: mm or °)
A3 REAL Position of robot axis A3 (unit: mm or °)
A4 REAL Position of robot axis A4 (unit: mm or °)
A5 REAL Position of robot axis A5 (unit: mm or °)
A6 REAL Position of robot axis A6 (unit: mm or °)
E1 REAL Position of external axis E1 (optional), (unit: mm or °)
E2 REAL Position of external axis E2 (optional), (unit: mm or °)
E3 REAL Position of external axis E3 (optional), (unit: mm or °)
E4 REAL Position of external axis E4 (optional), (unit: mm or °)
E5 REAL Position of external axis E5 (optional), (unit: mm or °)
E6 REAL Position of external axis E6 (optional), (unit: mm or °)
Element Type Description
X REAL Offset in X direction (unit: mm)
Y REAL Offset in Y direction (unit: mm)
Z REAL Offset in Z direction (unit: mm)
 Loading...
Loading...