108 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
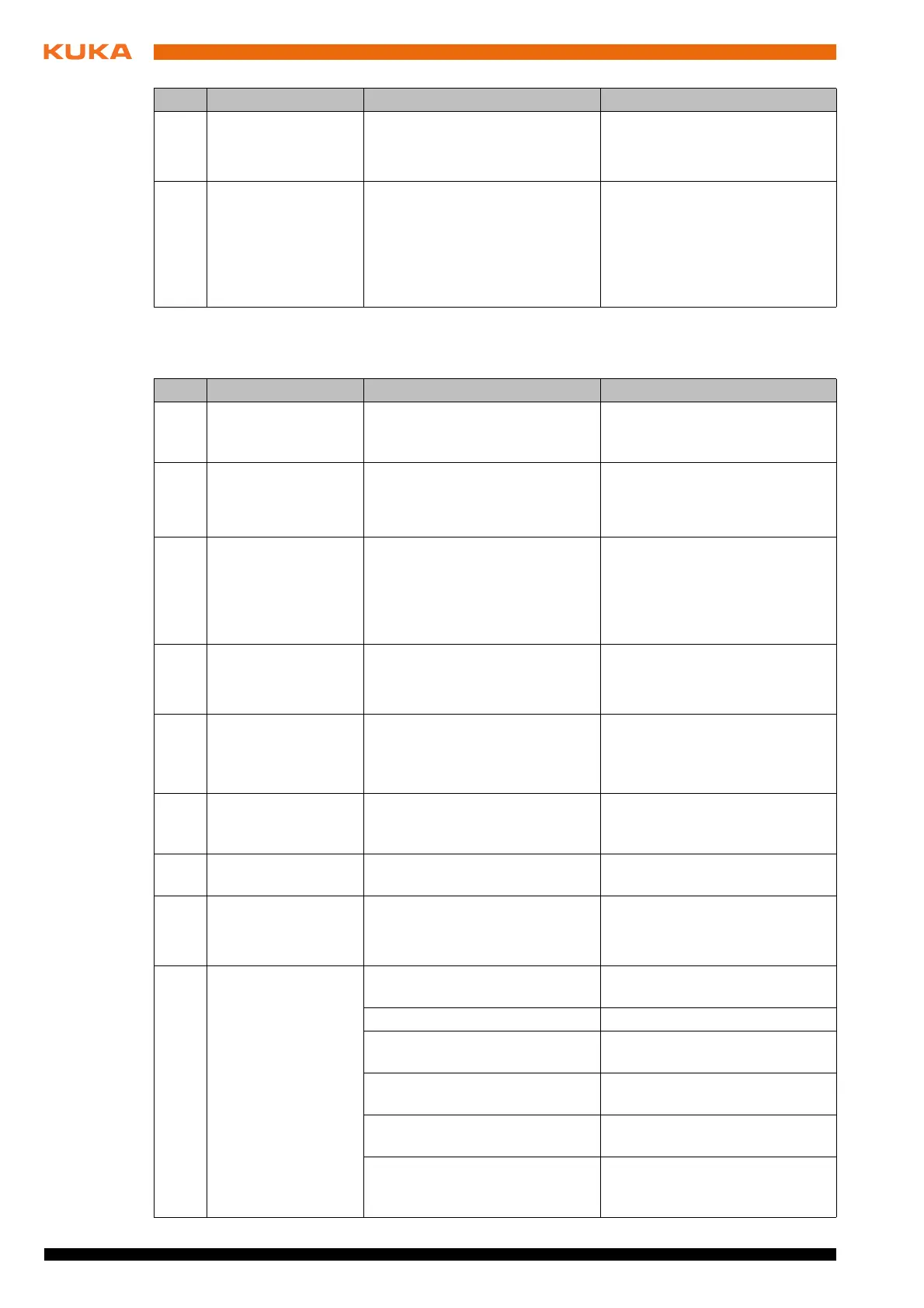
8.3 Error in the function block
466 ERROR SETTING
OUTPUT
Error writing an output. The out-
put may already be assigned by
the system.
Use a different digital output
(parameter Number):
1 … 2,048
467 ERROR SETTING
SOFTEND
An error occurred when writing
a software limit switch.
One possible error, for exam-
ple, is writing a rotational axis
with a value outside the range
+/-360°.
Program valid values for the
software limit switches (see
machine data).
No. Message text Cause Remedy
No. Message text Cause Remedy
501 INTERNAL ERROR Internal exceptional error Contact KUKA Roboter GmbH.
(>>> 9 "KUKA Service"
Page 111)
502 INVALID
BUFFER_MODE
BufferMode 0: DIRECT is not
permissible for this function
block.
Program the correct mode:
1: ABORTING
2: BUFFERED
503 INVALID MXA VER-
SION
The software versions of the
mxA interface and PLC library
are not compatible.
Install compatible software ver-
sions on the robot controller
and PLC.
(>>> 7.6.3 "Initializing the mxA
interface" Page 32)
504 INVALID OVER-
RIDE
Invalid override value in the
function block
KRC_SetOverride
Program a valid value (parame-
ter Override).
0 … 100%
505 MAX GROUP REF
IDX REACHED
The axis group index specified
in the function block
KRC_ReadAxisGroup is
already assigned.
Only instance the
KRC_ReadAxisGroup function
block once in a program.
506 INVALID GROU-
PREFIDX
The axis group index specified
in the function block is invalid.
Specify a valid index for the
axis group (parameter Axis-
GroupIdx).
507 INVALID FB
ORDER
The order in which the function
blocks were called is invalid.
Program the function blocks in
the correct order.
508 CONNECTION
NOT INITIALIZED
No statements can be trans-
ferred, as the mxA interface
has not been initialized.
Initialize the mxA interface.
(>>> 7.6.3 "Initializing the mxA
interface" Page 32)
509
510
NO CONNECTION
TO KRC
TIMEOUT HEART-
BEAT FROM KRC
Connection to robot controller
interrupted:
Restore connection, then
acknowledge error:
Robot controller is switched off Reboot the robot controller.
Submit interpreter deselected
or stopped
Restart Submit interpreter.
Bus error or I/O configuration
faulty
Check I/O configuration.
Connecting cable defective or
not correctly connected
Exchange connecting cable or
connect it correctly.
Maximum cycle time of the
Submit interpreter is too short
(only for message no. 510)
Increase the value for MaxSub-
mitCycle in the function block
KRC_DIAG.
 Loading...
Loading...