42 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Memory
Inputs
Outputs
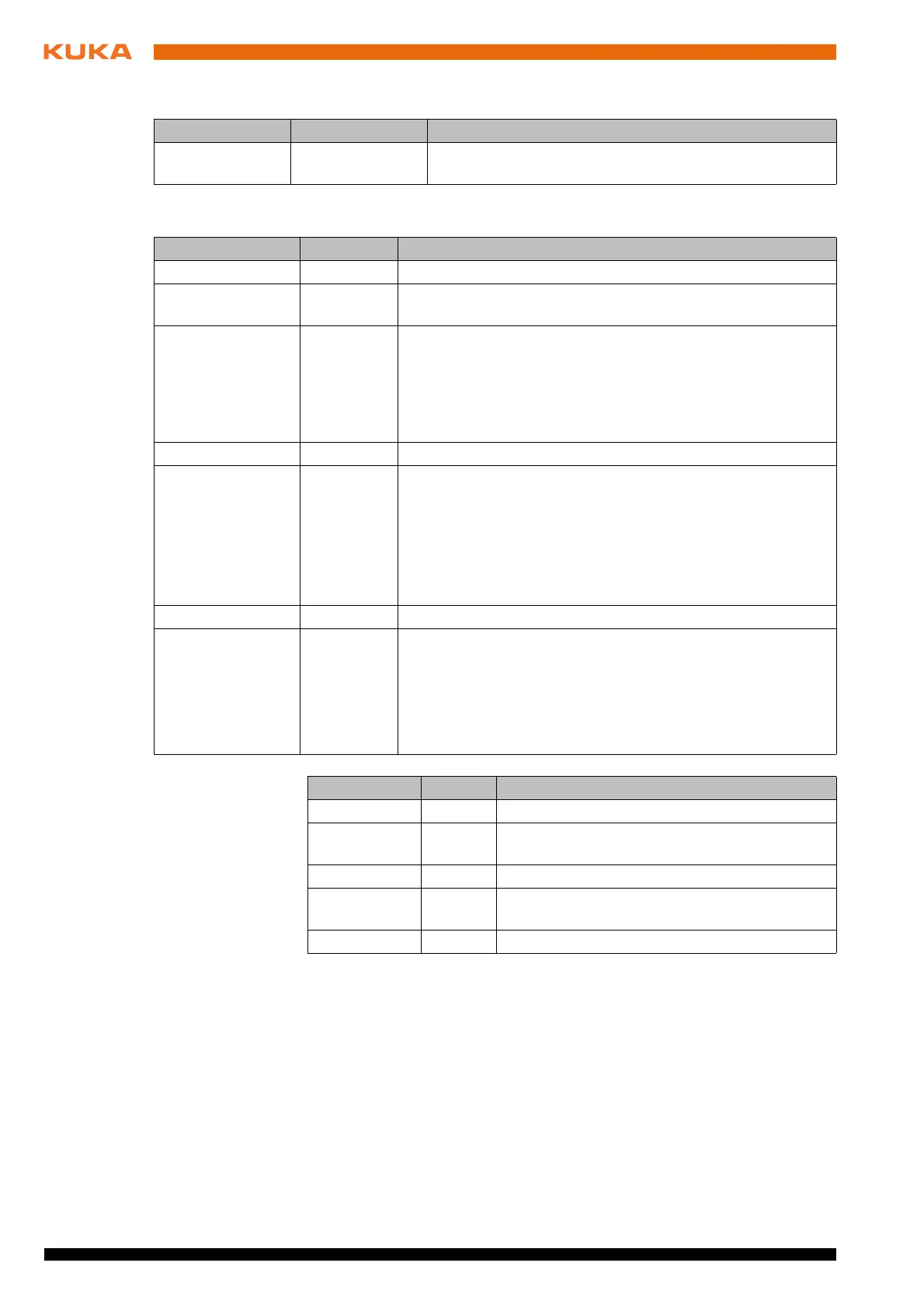
7.6.14 Reading an analog input
Description The function block KRC_ReadAnalogInput polls and reads an analog input of
the robot controller. This function is executed in the Submit interpreter.
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
ExecuteCmd BOOL The statement is executed in the case of a rising edge of the
signal.
Number INT Number of the digital output
1 … 2,048
Note: It must be ensured that no outputs are used that are
already assigned by the system. Example: $OUT[1025] is
always TRUE.
Value BOOL Value of the digital output
Pulse REAL Length of the pulse
0.0 s
No pulse active
0.1 … 3.0 s
Pulse interval = 0.1 s; pulse durations outside this range
of values trigger a program stop.
Continue BOOL TRUE = output written in advance run
BufferMode INT Mode in which the statement is executed
0: DIRECT
1: ABORTING
2: BUFFERED
(>>> "BufferMode" Page 27)
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Done BOOL TRUE = statement has been executed
Aborted BOOL TRUE = statement was aborted before it was
processed in the advance run
Error BOOL TRUE = error in function block
 Loading...
Loading...