75 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
7.7.4 Moving to a Cartesian position with a PTP_REL motion
Description The function block KRC_MoveDirectRelative executes a point-to-point motion
to a Cartesian end position. The coordinates of the end position are relative to
the current position.
Memory
Inputs
A REL statement always refers to the current position of the robot. For
this reason, if a REL motion is interrupted, the robot executes the en-
tire REL motion again, starting from the position at which it was inter-
rupted.
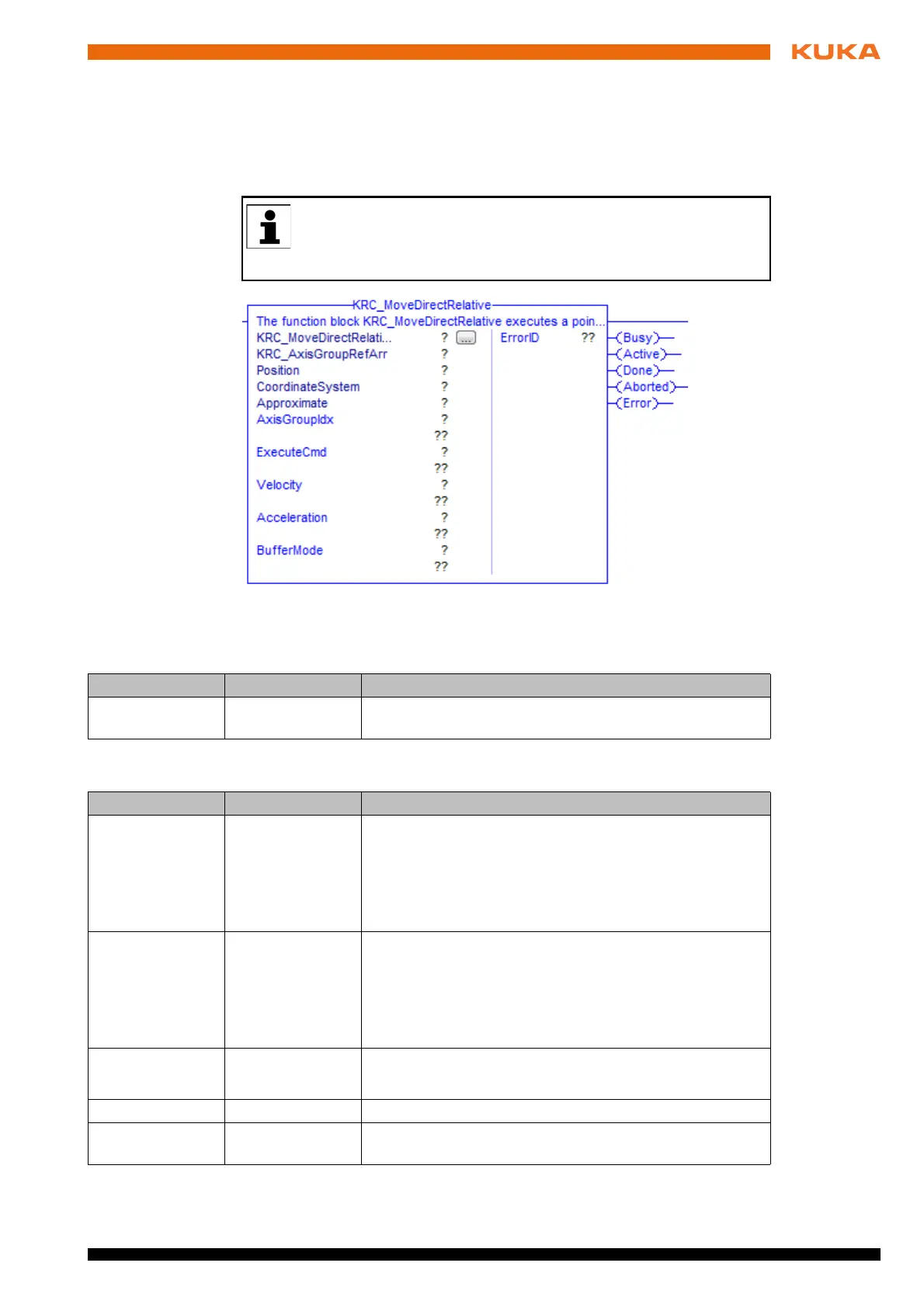
Fig. 7-42: Function block KRC_MoveDirectRelative
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
Position E6POS Coordinates of the Cartesian end position
(>>> "E6POS" Page 26)
The data structure E6POS contains all components of
the end position (= position of the TCP relative to the ori-
gin of the selected coordinate system).
CoordinateSys-
tem
COORDSYS Coordinate system to which the Cartesian coordinates of
the end position refer
(>>> "COORDSYS" Page 26)
Note: In the case of a PTP_REL motion, the Cartesian
coordinates always refer to the BASE coordinate system.
Approximate APO Approximation parameter
(>>> "APO" Page 25)
AxisGroupIdx INT Index of axis group
ExecuteCmd BOOL Starts/buffers the motion in the case of a rising edge of
the signal.
 Loading...
Loading...