88 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Memory
Inputs
7.8.5 Reading diagnostic signals
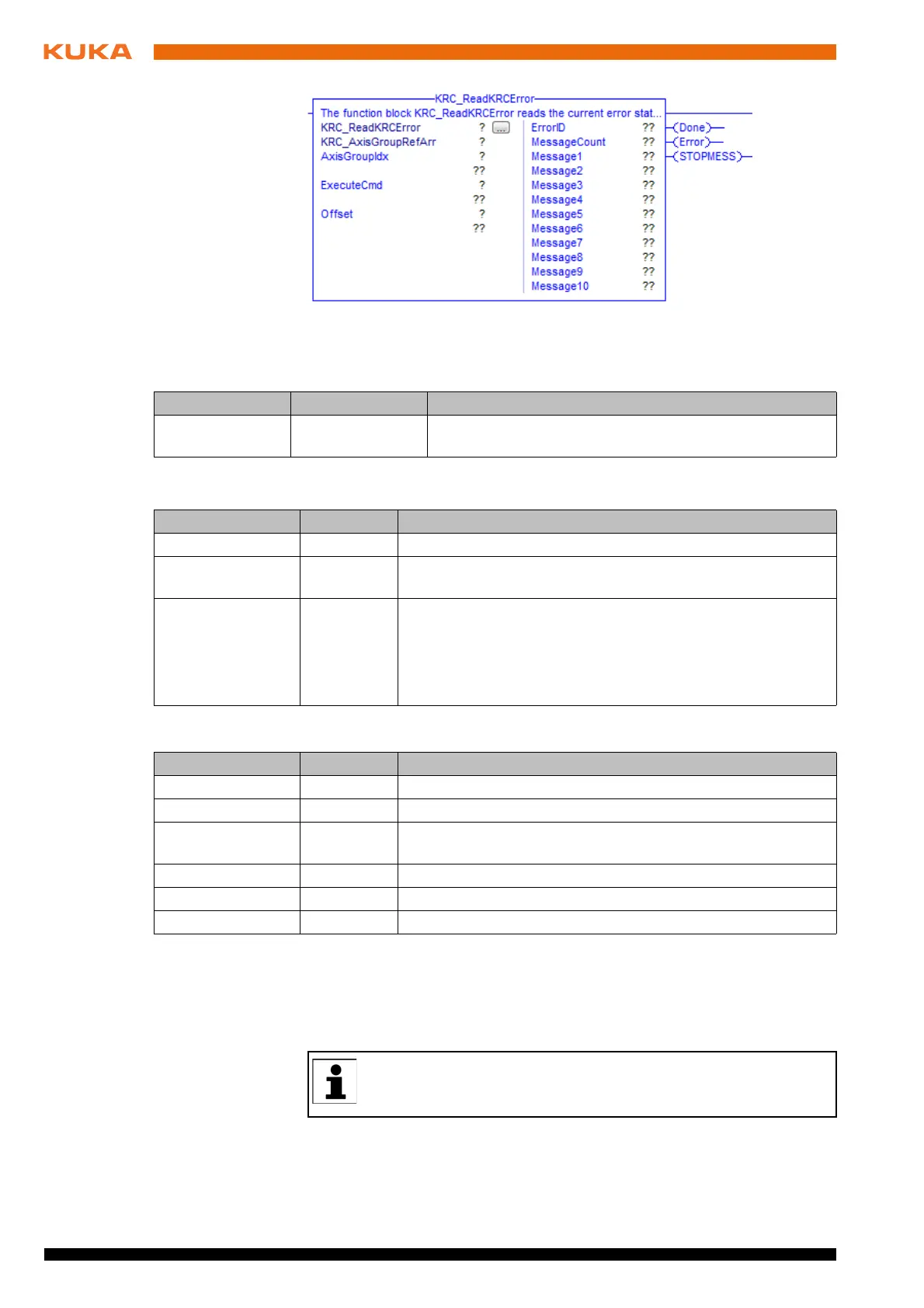
Description The function block KRC_Diag reads the diagnostic signals of the robot control-
ler.
Fig. 7-51: Function block KRC_ReadKRCError
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
ExecuteCmd BOOL The statement is executed in the case of a rising edge of the
signal.
Offset INT If there are more than 10 messages in the message buffer,
the desired start index of the message buffer can be selected
using the offset.
Example: If there are 15 messages in the message buffer,
the offset must be 6 in order to read messages 6 to 15.
Parameter Type Description
ErrorID DINT Error number
MessageCount INT Number of messages in the message buffer
Message1 …
Message10
DINT The numbers of up to 10 messages in the message buffer
can be output.
Done BOOL TRUE = data are valid
Error BOOL TRUE = error in function block
STOPMESS BOOL TRUE = safety circuit is interrupted (robot fault)
The function block may only be instanced once per robot. In the case
of multiple instancing, the signals of the most recently called function
block are output.
 Loading...
Loading...