38 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Memory
Inputs
Outputs
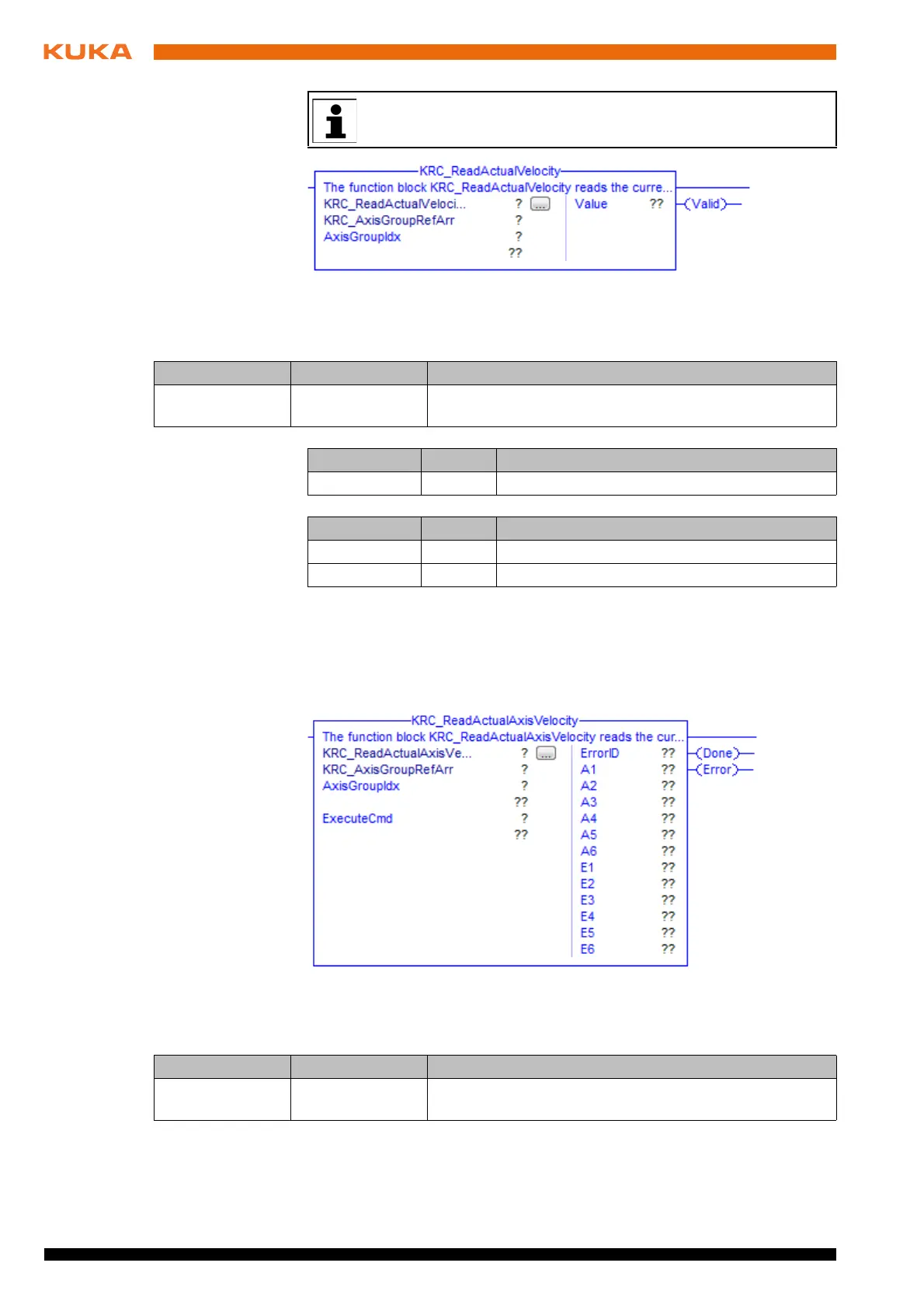
7.6.9 Reading the current axis velocity
Description The function block KRC_ReadActualAxisVelocity reads the current axis-spe-
cific velocity of the robot $VEL_AXIS_ACT.
Memory
The current path velocity can only be read for CP motions in program
mode.
Fig. 7-9: Function block KRC_ReadActualVelocity
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
Parameter Type Description
Value REAL Current path velocity $VEL_ACT (unit: m/s)
Valid BOOL TRUE = data are valid
Fig. 7-10: Function block KRC_ReadActualAxisVelocity
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
 Loading...
Loading...