84 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Outputs
7.7.9 Jogging to a relative end position in the TOOL coordinate system
Description The function block KRC_JogToolRelative can be used to move to a Cartesian
end position in the TOOL coordinate system with a linear motion. The coordi-
nates of the end position are relative to the current position. Status and Turn
of the end position are ignored, i.e. the axis positions at the end position are
not unambiguously defined.
The function is always executed in ABORTING mode, i.e. all active motions
and buffered statements are canceled, the robot is braked and the linear mo-
tion is then executed.
Memory
Acceleration INT Acceleration
0 … 100%
Refers to the maximum value specified in the machine
data. The maximum value depends on the robot type and
the selected operating mode.
Default: 0% (= acceleration is not changed)
OriType INT Orientation control of the TCP
0: VAR
1: CONSTANT
2: JOINT
(>>> "OriType" Page 28)
Parameter Type Description
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Active BOOL TRUE = motion is currently being executed
Done BOOL TRUE = motion has stopped
Aborted BOOL TRUE = statement/motion has been aborted
Error BOOL TRUE = error in function block
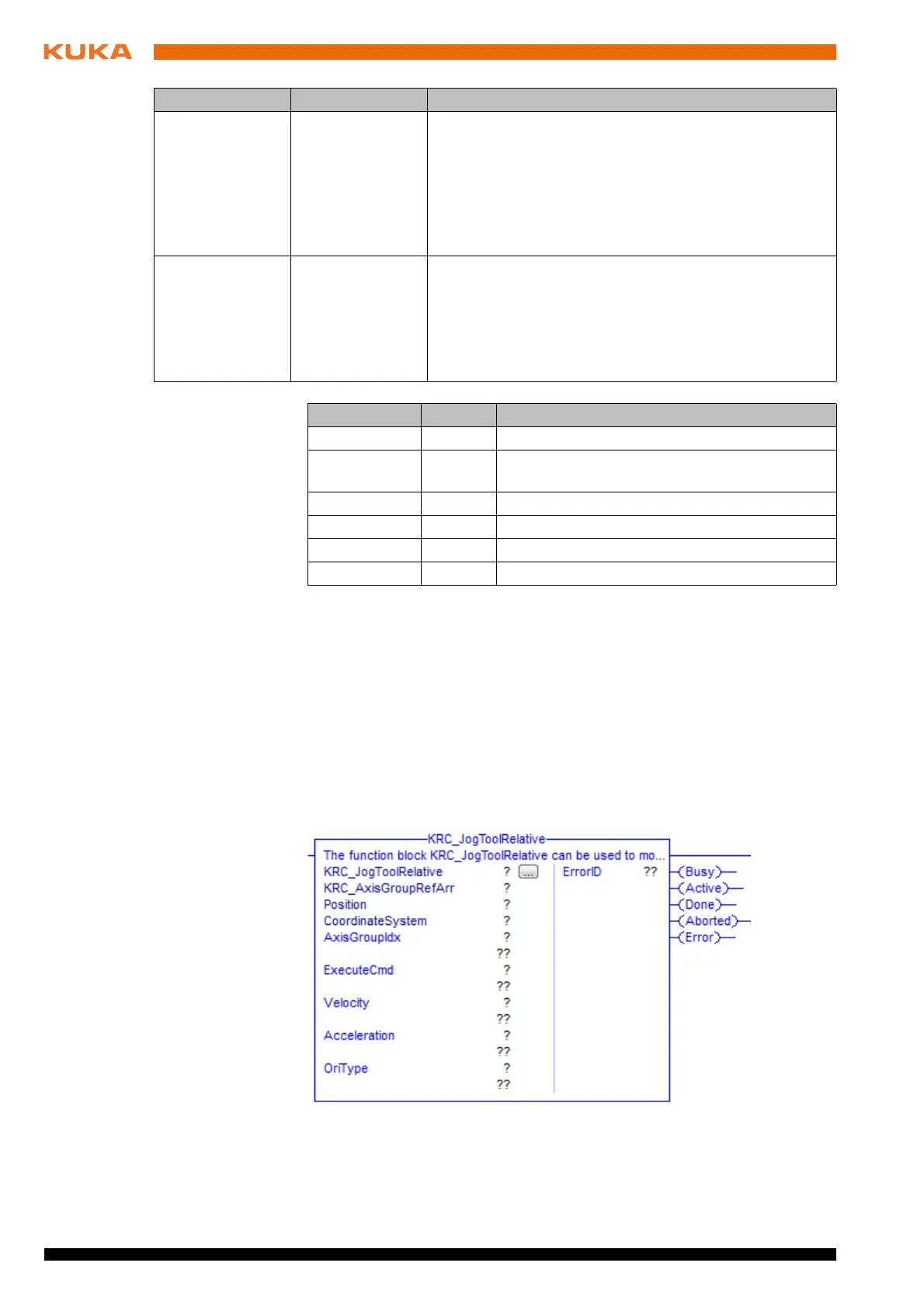
Fig. 7-47: Function block KRC_JogToolRelative
 Loading...
Loading...