77 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
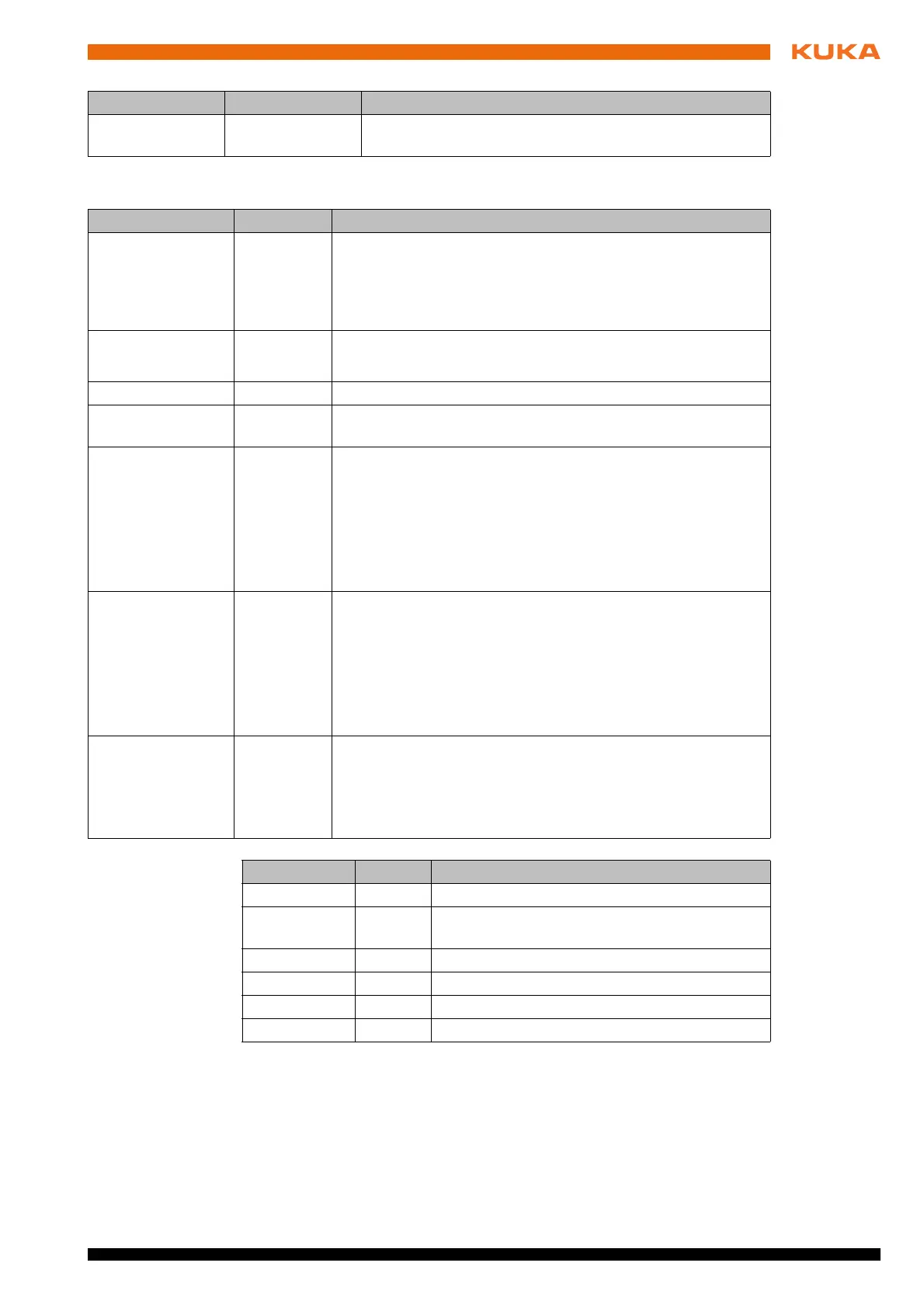
Inputs
Outputs
7.7.6 Moving to a Cartesian position with a CIRC motion
Description The function block KRC_MoveCircAbsolute executes a circular motion to a
Cartesian end position. In order for the robot controller to be able to calculate
the circular motion, an auxiliary position must be specified in addition to the
end position.
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisPosition E6AXIS Axis-specific end position
(>>> "E6AXIS" Page 26)
The data structure E6Axis contains the angle values or trans-
lation values for all axes of the axis group in the end position.
Approximate APO Approximation parameter
(>>> "APO" Page 25)
AxisGroupIdx INT Index of axis group
ExecuteCmd BOOL Starts/buffers the motion in the case of a rising edge of the
signal.
Velocity INT Velocity
0 … 100%
Refers to the maximum value specified in the machine data.
The maximum value depends on the robot type and the
selected operating mode.
Default: 0% (= velocity is not changed)
Acceleration INT Acceleration
0 … 100%
Refers to the maximum value specified in the machine data.
The maximum value depends on the robot type and the
selected operating mode.
Default: 0% (= acceleration is not changed)
BufferMode INT Mode in which the statement is executed
1: ABORTING
2: BUFFERED
(>>> "BufferMode" Page 27)
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Active BOOL TRUE = motion is currently being executed
Done BOOL TRUE = motion has stopped
Aborted BOOL TRUE = statement/motion has been aborted
Error BOOL TRUE = error in function block
 Loading...
Loading...