73 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
Outputs
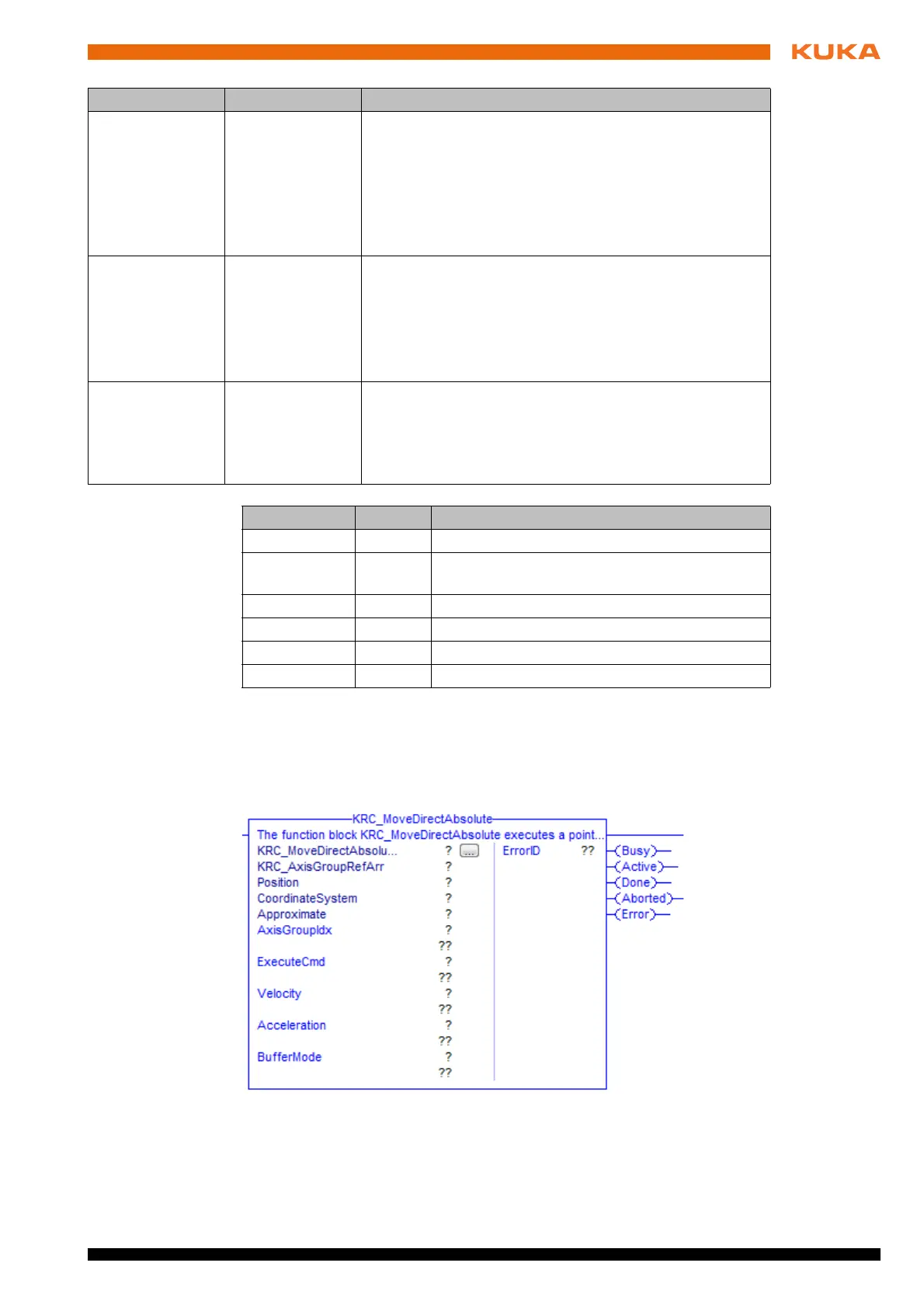
7.7.3 Moving to a Cartesian position with a PTP motion
Description The function block KRC_MoveDirectAbsolute executes a point-to-point motion
to a Cartesian end position. The coordinates of the end position are absolute.
Memory
Acceleration INT Acceleration
0 … 100%
Refers to the maximum value specified in the machine
data. The maximum value depends on the robot type and
the selected operating mode.
Default: 0% (= acceleration is not changed)
OriType INT Orientation control of the TCP
0: VAR
1: CONSTANT
2: JOINT
(>>> "OriType" Page 28)
BufferMode INT Mode in which the statement is executed
1: ABORTING
2: BUFFERED
(>>> "BufferMode" Page 27)
Parameter Type Description
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Active BOOL TRUE = motion is currently being executed
Done BOOL TRUE = motion has stopped
Aborted BOOL TRUE = statement/motion has been aborted
Error BOOL TRUE = error in function block
Fig. 7-41: Function block KRC_MoveDirectAbsolute
 Loading...
Loading...