25 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
7.3 Structures for motion programming (STRUCT)
The data structures used for motion programming are described below.
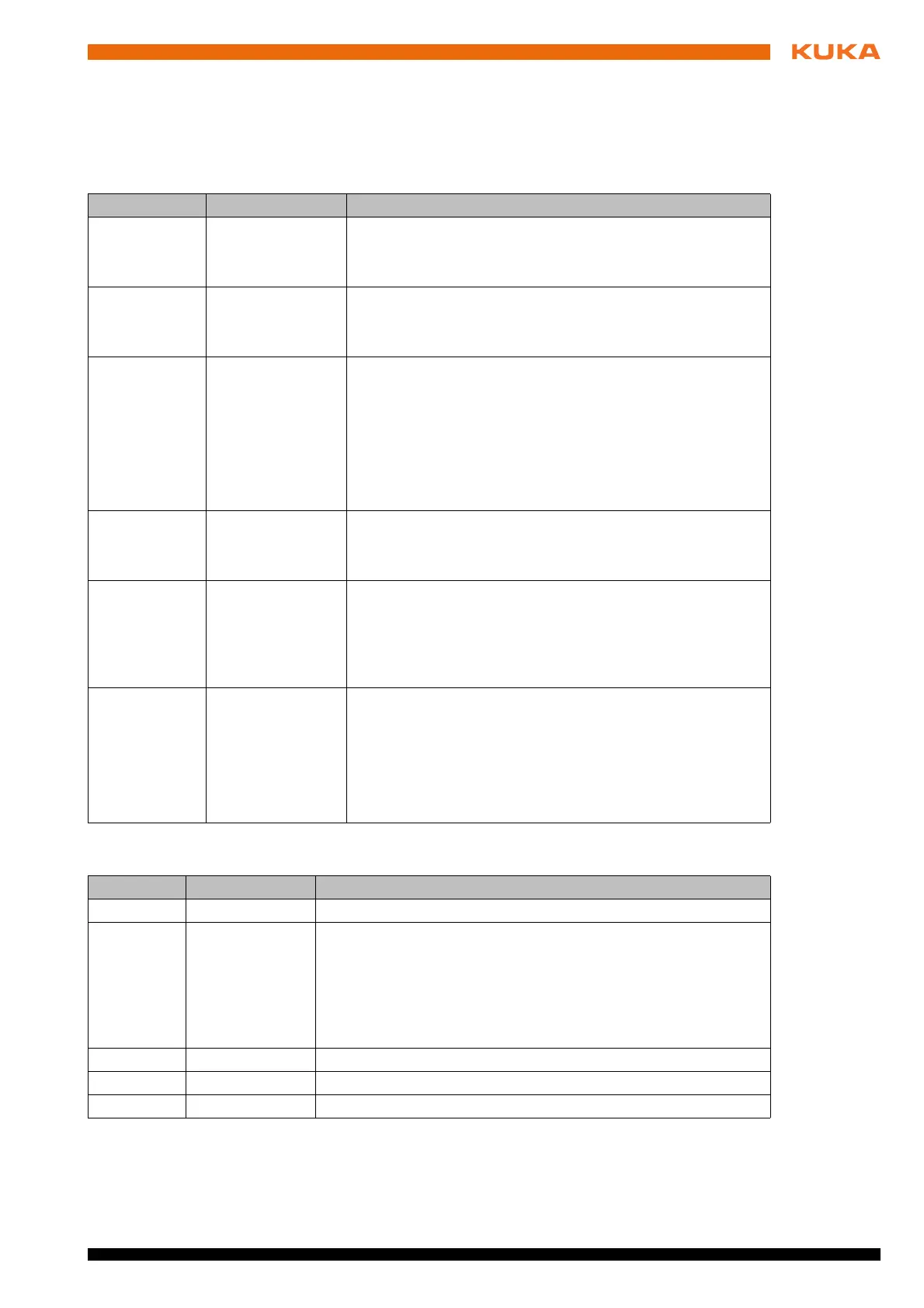
APO Approximation parameters for a KRC_Move motion command
PTP_APO (INT) Approximate positioning with PTP motions
CP_APO (INT) Approximate positioning with CP motions (LIN, CIRC)
Element Type Description
PTP_MODE PTP_APO (INT) Specifies whether and how the end point of a PTP motion
is approximated.
(>>> "PTP_APO (INT)" Page 25)
CP_MODE CP_APO (INT) Specifies whether and how the end point of a CP motion
(LIN, CIRC) is approximated.
(>>> "CP_APO (INT)" Page 25)
CPTP INT Approximation distance for PTP motions (= furthest dis-
tance before the end point at which approximate position-
ing can begin)
1 … 100%
Maximum distance 100%: half the distance between the
start point and the end point relative to the contour of the
PTP motion without approximate positioning
CDIS REAL Distance parameter (unit: mm)
Approximation starts, at the earliest, when the distance to
the end point falls below the value specified here.
CORI REAL Orientation parameter (unit: °)
Approximation starts, at the earliest, when the dominant
orientation angle (rotation or swiveling of the longitudinal
axis of the tool) falls below the angle distance to the target
point specified here.
CVEL INT Velocity parameter
1 … 100%
The approximation parameter specifies the percentage of
the programmed velocity at which the approximate posi-
tioning process is started, at the earliest, in the deceleration
phase towards the end point.
Value Name Description
0 – Without approximate positioning (default)
1 C_PTP Causes the end point to be approximated.
The specification C_PTP is sufficient for PTP-PTP approximate
positioning. In the case of PTP-CP approximation, i.e. if the
approximated PTP block is followed by a LIN or CIRC block,
another approximate positioning parameter must also be speci-
fied.
2 C_PTP, C_DIS PTP-CP approximation with distance parameter (default)
3 C_PTP, C_ORI PTP-CP approximation with orientation parameter
4 C_PTP, C_VEL PTP-CP approximation with velocity parameter
 Loading...
Loading...