96 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Outputs
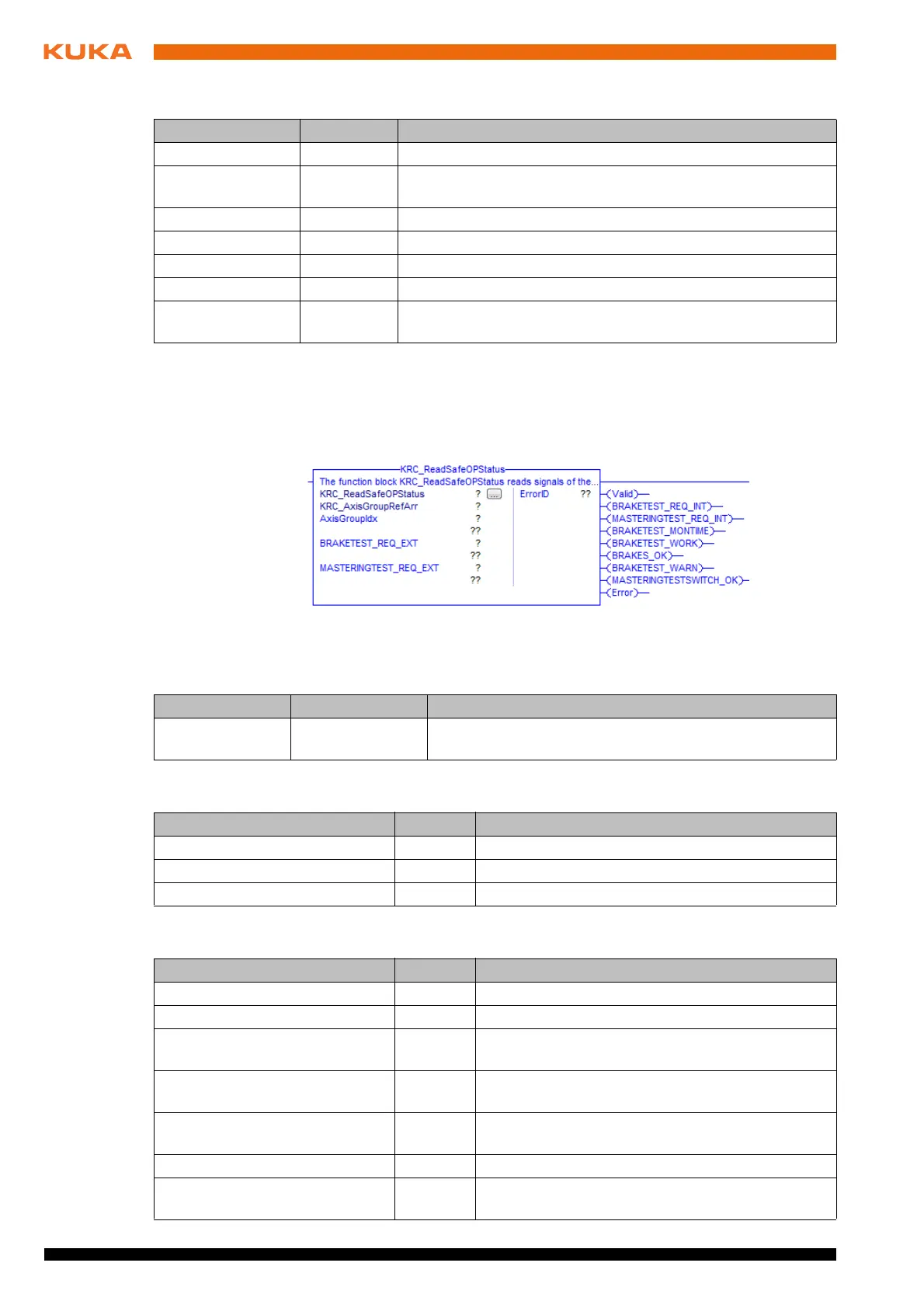
7.9.5 Reading the safety controller signals
Description The function block KRC_ReadSafeOPStatus reads signals of the safety con-
troller. (Only relevant if KUKA.SafeOperation is installed.)
Memory
Inputs
Outputs
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being transferred or has
already been transferred
Active BOOL TRUE = motion is currently being executed
Done BOOL TRUE = motion has stopped
Aborted BOOL TRUE = statement/motion has been aborted
Error BOOL TRUE = error in function block
MasRefRequest BOOL TRUE = mastering test has been requested internally by the
robot controller.
Fig. 7-57: Function block KRC_ReadSafeOPStatus
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
MASTERINGTEST_REQ_EXT BOOL TRUE = mastering test requested by the PLC.
BRAKETEST_REQ_EXT BOOL TRUE = brake test requested by the PLC.
Parameter Type Description
ErrorID DINT Error number
Valid BOOL TRUE = data are valid
BRAKETEST_REQ_INT BOOL TRUE = brake test requested by the safety con-
troller.
MASTERINGTEST_REQ_INT BOOL TRUE = mastering test requested by the safety
controller.
BRAKETEST_MONTIME BOOL TRUE = robot was stopped due to elapsed brake
test monitoring time.
BRAKETEST_WORK BOOL TRUE = brake test is currently being performed
BRAKES_OK BOOL Edge TRUE --> FALSE: A brake has been identi-
fied as defective.
 Loading...
Loading...