68 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
Outputs
7.6.36 Stopping the robot
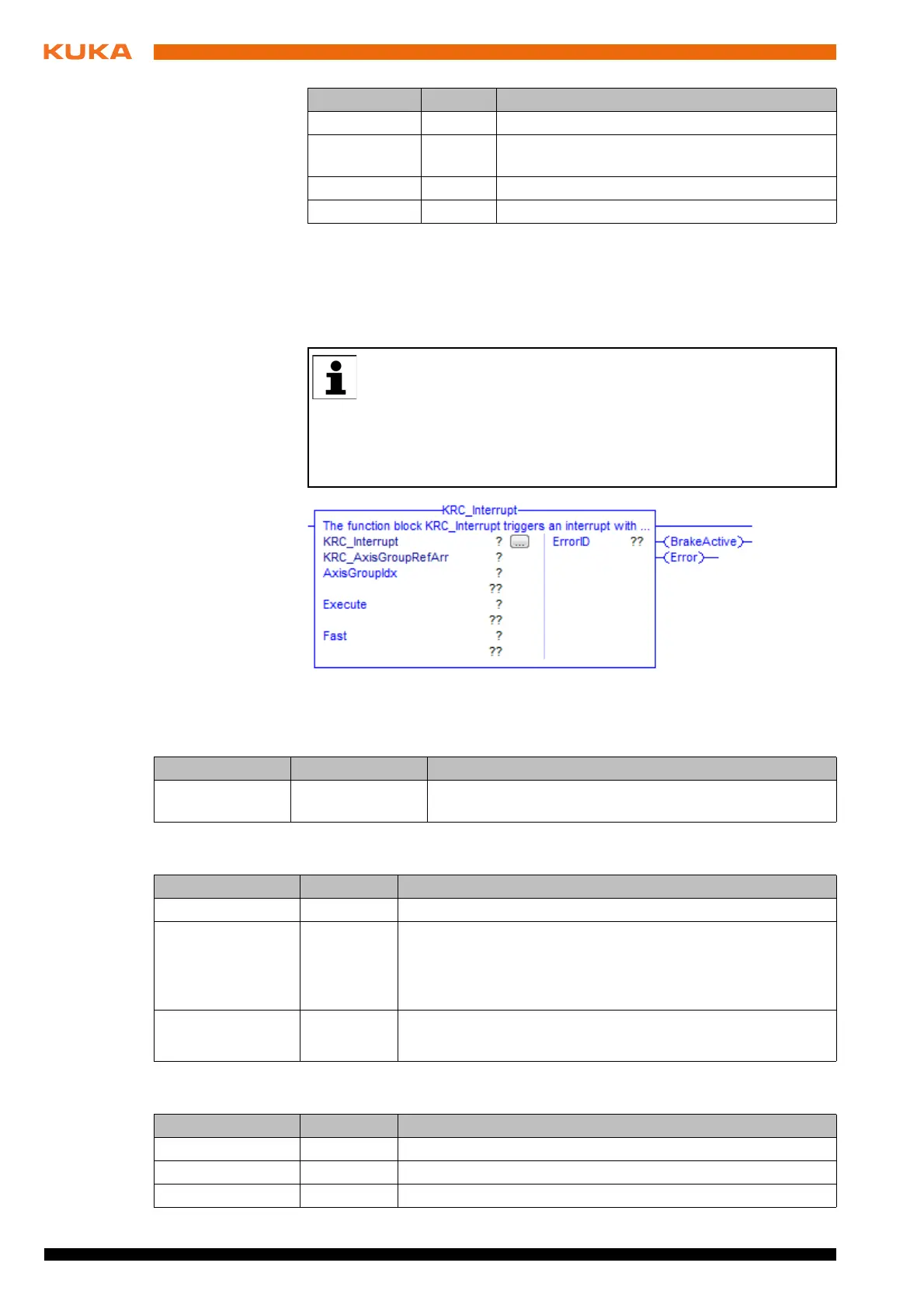
Description The function block KRC_Interrupt triggers an interrupt with a BRAKE or
BRAKE F statement.
Memory
Inputs
Outputs
Parameter Type Description
ErrorID DINT Error number
Busy BOOL TRUE = statement is currently being trans-
ferred or has already been transferred
Done BOOL TRUE = statement has been executed
Error BOOL TRUE = error in function block
If a BRAKE statement is active, no more statements are processed
via the mxA interface.
The function block KRC_Abort is also no longer processed.
KRC_Abort cannot cancel the program until it has been resumed with
KRC_Continue, i.e. the BRAKE statement is no longer active.
While the BRAKE statement is active, the program can only be canceled by
means of a RESET of the function block KRC_AutomaticExternal.
Fig. 7-37: Function block KRC_Interrupt
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
AxisGroupIdx INT Index of axis group
Execute BOOL The statement is executed in the case of a rising edge of the
signal.
The robot program is interrupted for as long as the input Exe-
cute is set to TRUE.
Fast BOOL TRUE = robot stops with a STOP 1 (BRAKE F statement).
FALSE = robot stops with a STOP 2 (BRAKE statement).
Parameter Type Description
ErrorID DINT Error number
BrakeActive BOOL TRUE = statement is active and robot is waiting for enabling
Error BOOL TRUE = error in function block
 Loading...
Loading...