78 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
The coordinates of the auxiliary position and end position are absolute. The
auxiliary position cannot be approximated. The motion always stops exactly at
this point.
Memory
Inputs
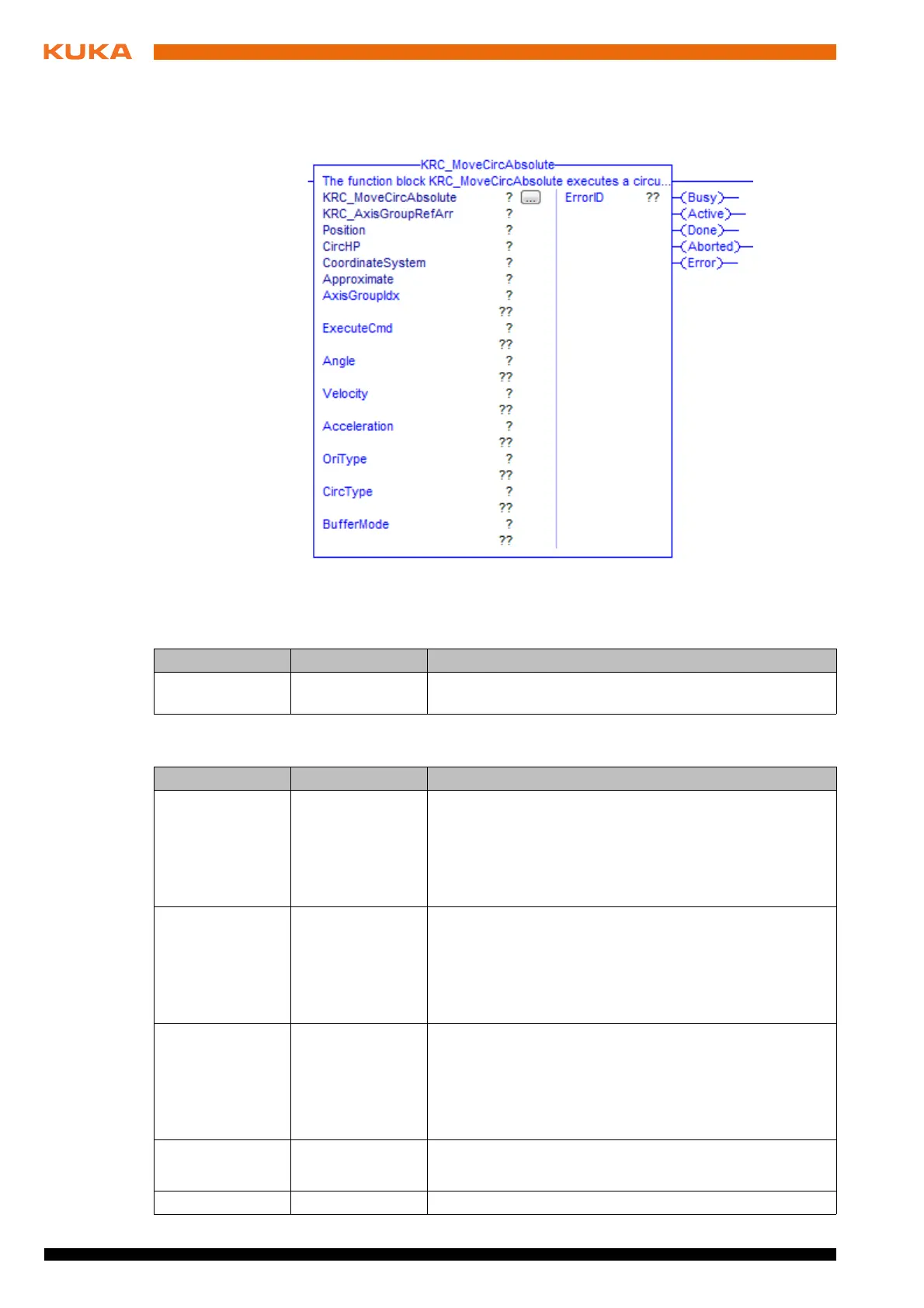
Fig. 7-44: Function block KRC_MoveCircAbsolute
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
Position E6POS Coordinates of the Cartesian end position
(>>> "E6POS" Page 26)
The data structure E6POS contains all components of
the end position (= position of the TCP relative to the ori-
gin of the BASE coordinate system).
CircHP E6POS Coordinates of the Cartesian auxiliary position
(>>> "E6POS" Page 26)
The data structure E6POS contains all components of
the auxiliary position (= position of the TCP relative to the
origin of the BASE coordinate system).
CoordinateSys-
tem
COORDSYS Coordinate system to which the Cartesian coordinates of
the auxiliary or end position refer
(>>> "COORDSYS" Page 26)
Note: In the case of a CIRC motion, the Cartesian coordi-
nates always refer to the BASE coordinate system.
Approximate APO Approximation parameter
(>>> "APO" Page 25)
AxisGroupIdx INT Index of axis group
 Loading...
Loading...