Chapter 7 EtherCAT Communication
(In the table above, O: Optional; M: Mandatory.)
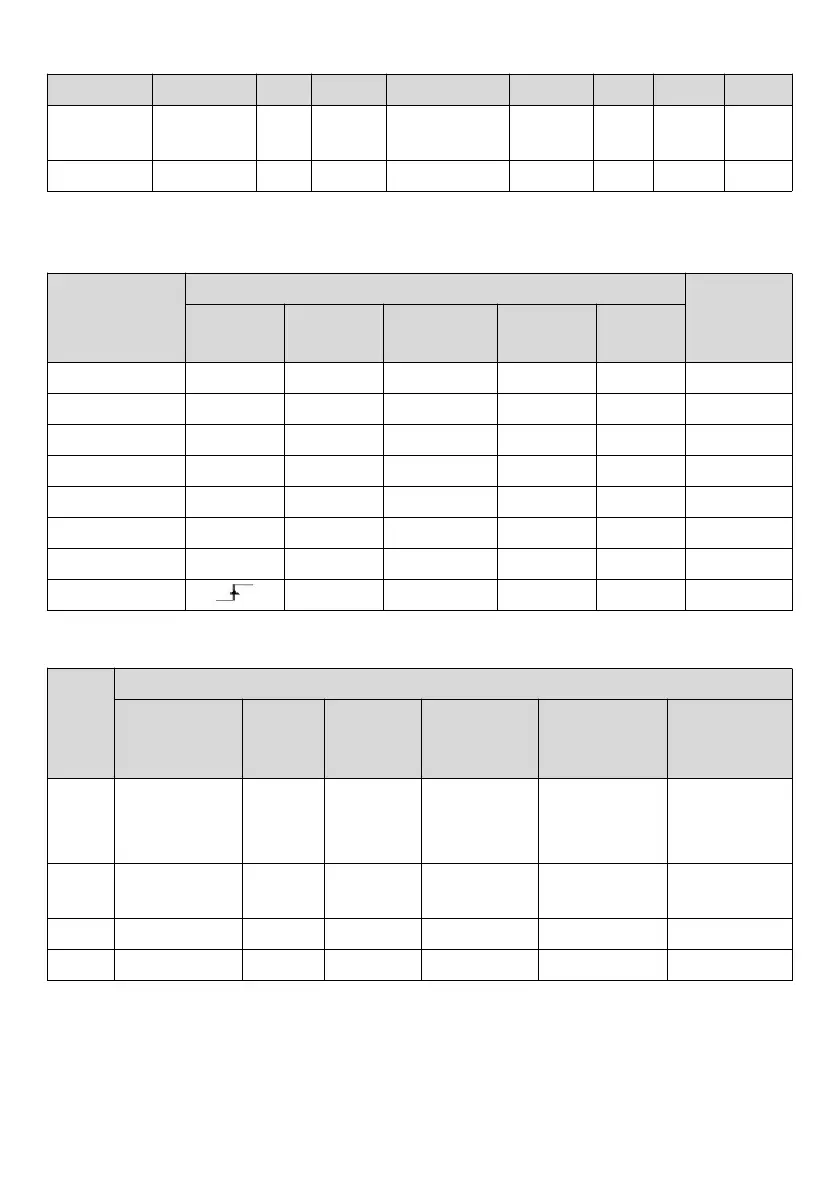
The control commands consisting of Bit0~Bit3 and Bit7 of the control word are used to switch the state machine.
The following table describes the defined control commands.
(In the table above, the bit marked "X" can be ignored.)
Bit4~Bit6 and Bit8 of the control word are defined differently in different control modes.
Interpolated
position mode
Cyclic
Synchronous
position mode
Cyclic
Synchronous
velocity mode
(See the running mode description for the definition of each bit in the table.)
7.3.3.2 Status word
The bit definition of the status word is shown in the following table.
 Loading...
Loading...