Chapter 7 EtherCAT Communication
0x6098 = 2
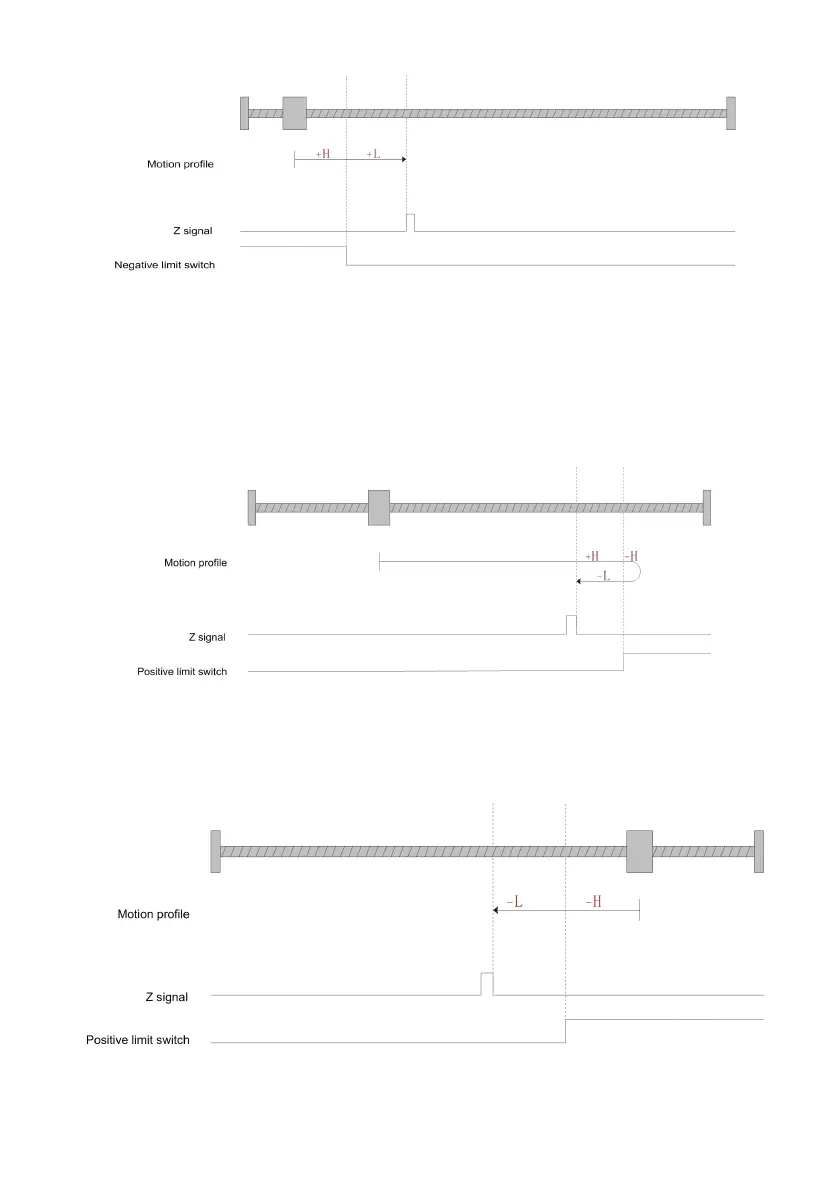
Forward, positive limit switch as deceleration point and Z signal as home
The current position of the motor is where the positive limit switch is invalid. When the homing is started, the
positive limit switch is at a low level, and forward high-speed returns to home. After encountering the rising edge
of the positive limit switch, it runs at a high-speed in the reverse direction, after encountering the falling edge of
the positive limit switch, it will run reverse at low speed, and stop when encountering the rising edge of the Z
signal.
The current position of the motor is at the positive limit switch. When the homing is started, the positive limit
switch is at a high level, and reverse high-speed returns to home. After encountering the falling edge of the
positive limit switch, it runs at a low speed in the reverse direction, and stop when encountering the rising edge of
the Z signal.
0x6098 = 3
 Loading...
Loading...