13-224 13-224
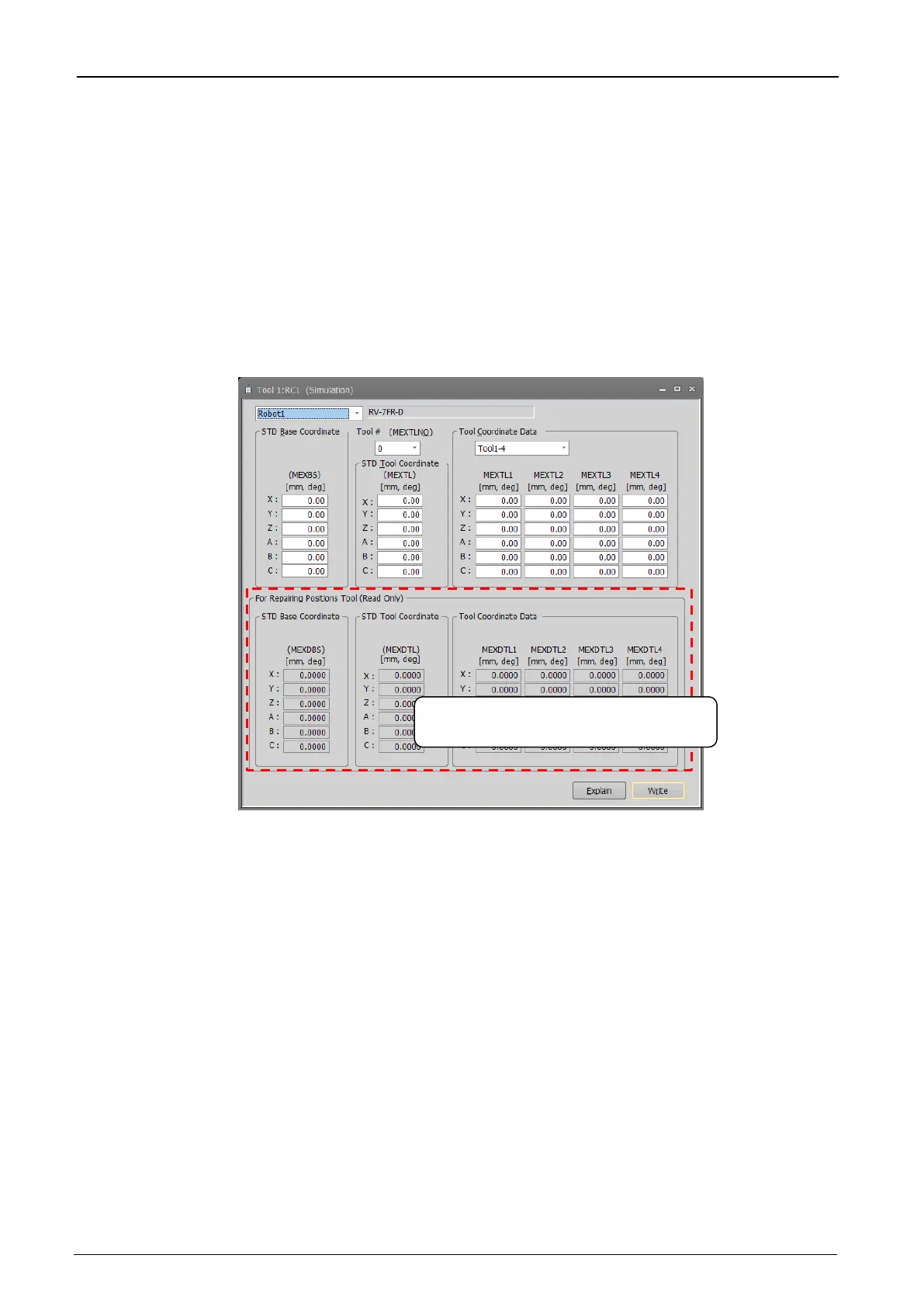
13.3.5. Tool parameter
You can set the robot's standard tool coordinates, standard BASE coordinates and tool number. Set parameters
while connected to the robot controller.
Double-click [Movement parameter] -> [Tool] under the [Parameter] item to be edited from the project tree.
Multi-Hand is available in all versions of CR800 series controllers and in software version S2a/R2a or later on
CR750/700 series controllers.
The tool coordinate system (MEXTL) can be input only when the TOOL number is "0". Also, when the tool
number is changed from non-"0" to "0", the values of the tool coordinate system will all be set to 0. However, if the
tool number on the screen is displayed as "0", when it is changed to non-"0" and then return to "0" again, the tool
coordinate system will display the value before the changed.
After you change a parameter value, you can rewrite the tool parameters in the robot controller by clicking the
[Write] button.
Figure 13-22 Tool parameter
It can also be set from "Step 7. Tool" (8.9.7 Step 7. Tool) on the project edit screen.
Displayed when you are connected to a
controller that supports position repair.
 Loading...
Loading...


