13-232 13-232
13.3.14. Force control parameters
You can set parameters related to force control in PC and robot controllers.
For details of these parameters, refer to the user’s manual of the force control function.
13.3.14.1. Force sensor parameter
Double-click [Movement parameter] -> [Force control] -> [Force sensor] under the [Parameter] item to be edited
from the project tree.
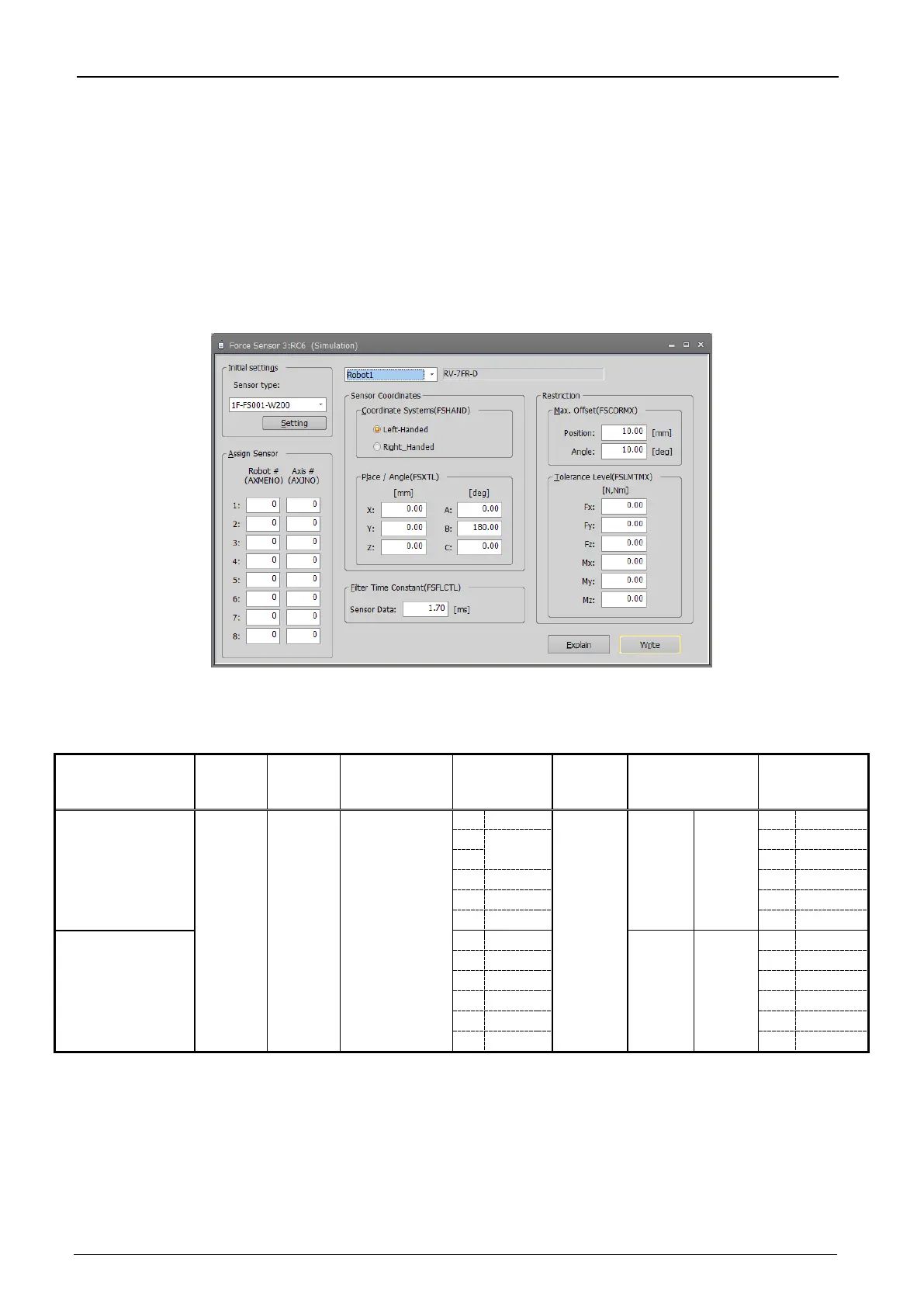
Set the parameters, [Assign sensor], [Sensor coordinates], [Filter time constant], [Restriction], and [Tolerance
level] which are used by the force control function.
Figure 13-32 Force sensor parameter
You can use the [Setting] button to initialize the force sensor. Values set by initial setting are as follows.
Table 13-10 Sensor type initial setting value
Sensor type Robot # Axis #
Left-Handed/
Right-Handed
Place/Angle
time
Max offset
Tolerance
level
1F-FS001-W200
The first
element
is 1
Otherwise
0
The first
element
is 9
Otherwise
0
Left-Handed
1.70
Position
200.00
1F-FS001-W1000
Angle
150.00
You can reference explanations of the displayed parameters by pressing the [Explain] button.
After you change a parameter values, you can rewrite the parameters in the robot controller by clicking the [Write]
button.
13.3.14.2. Force control mode parameters
Double-click [Movement parameter] -> [Force control] -> [Force control mode] under the [Parameter] item to be
 Loading...
Loading...


