20-499 20-499
20.4. Cooperative control simulation
Cooperative control by multiple robots can be simulated. Cooperative control is available only when
CR800-R/CR800-Q/CR750-Q/CRnQ-700 controller is selected.
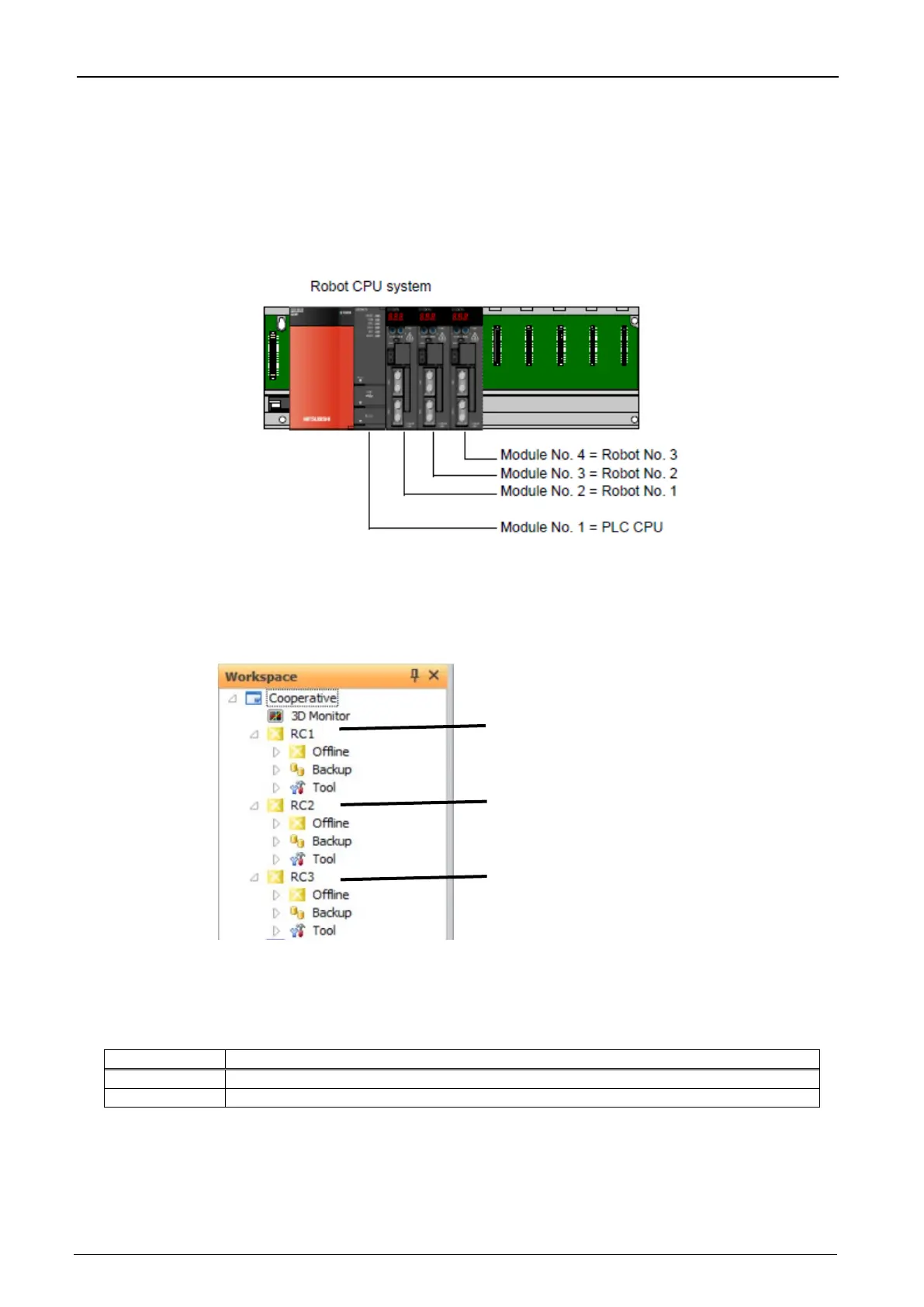
The correspondence between the robot number used for coordinated control and the slot number of the robot
CPU installed in the PLC base unit is as shown below. The robot CPU must be installed in order from the first
slot.
Figure 20-12 Correspondence between robot number and mounting position of robot CPU
The correspondence between the project in the workspace and the robot number is as follows.
From the first project, it is assigned as Module No. 2 (Robot No. 1) -> Module No. 3 (Robot No. 2) -> Module No.
4 (Robot No. 3). This function can not be used if there are projects other than CR800-R/CR800-Q/CR750-Q/
CRnQ-700 on the way.
Figure 20-13 Correspondence between robot number and mounting position of robot CPU
With cooperative control simulation support, the following state variables can now be used in simulation.
For details, refer to the instruction manual “Detailed explanations of functions and operations 4.14 Detailed
explanation of Robot Status Variable”.
Reads/Writes the signals per word directly with two or more robot CPUs.
Reads/Writes the signals per double word directly with two or more robot CPUs.
20.4.1. Cooperative operation
It is possible to simulate the operation of conveying one work in cooperation with up to three robots.
For details, refer to the instruction manual “Detailed explanations of functions and operations 7.5 Cooperative
operation function”.
Module No. 2 (Robot No. 1)
Module No. 3 (Robot No. 2)
Module No. 4 (Robot No. 3)
 Loading...
Loading...


