13-230 13-230
13.3.12. Movement parameters
You can set information related to the optimum acceleration/deceleration for robot operation and set compliance
errors.
The information that can be set concerning movement parameters depends on the robot controller connected.
Table 13-8 The controller which you can set information related to optimum acceleration/deceleration for robot
operation and set compliance errors
Maximum acceleration/deceleration
correction ratio
Can be used with all versions
Compliance error function settings
Optimum acceleration/deceleration
setting
Set parameters while connected to the robot controller.
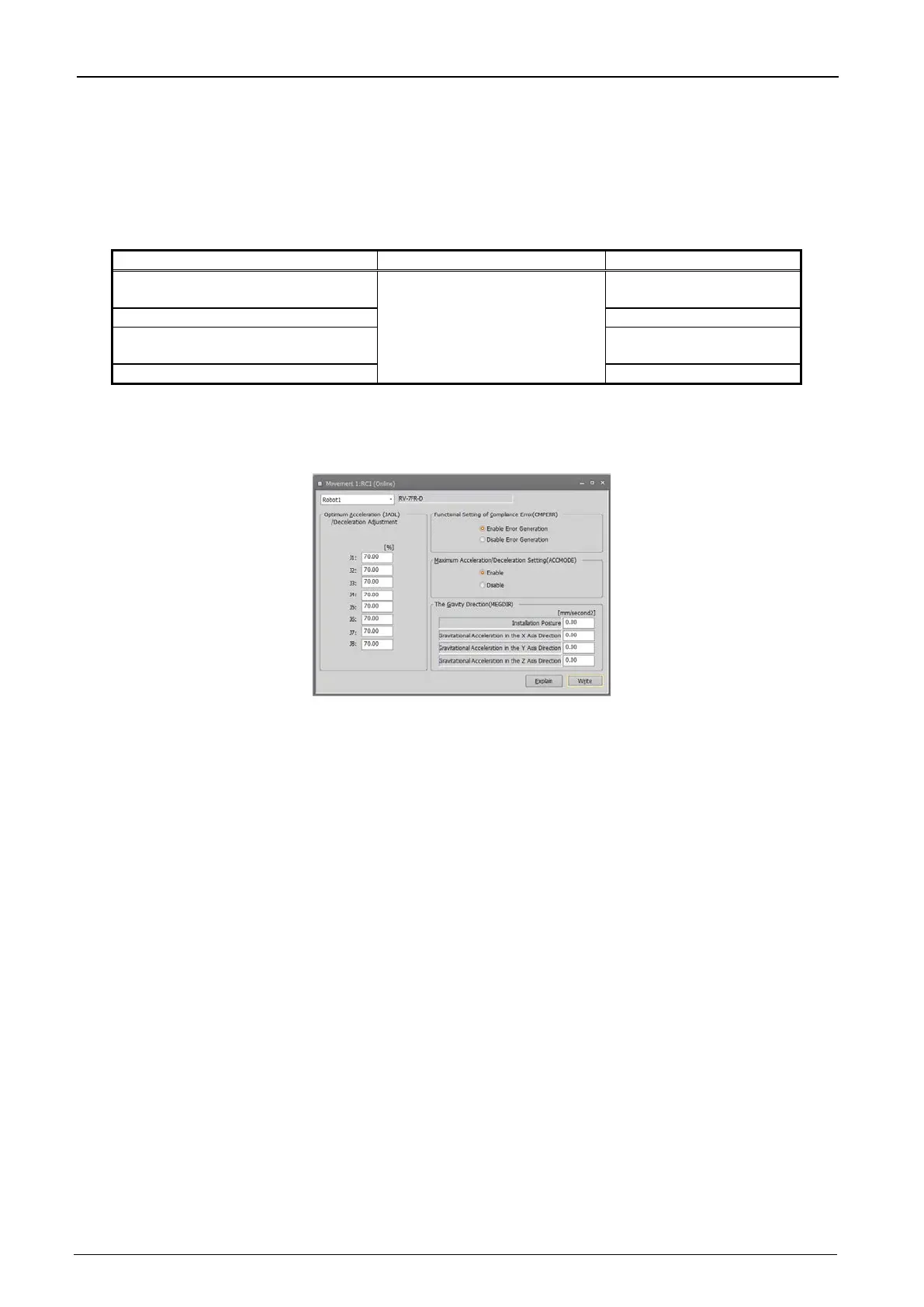
Double-click [Movement parameter] -> [Movement] under the [Parameter] item to be edited from the project tree.
After you change a parameter value, you can rewrite the parameters in the robot controller by clicking the [Write]
button.
Figure 13-30 Movement parameter
You can reference explanations of the displayed parameters by pressing the [Explain] button.
 Loading...
Loading...


