5-91
5-16 User Parameters
5
Operating Functions
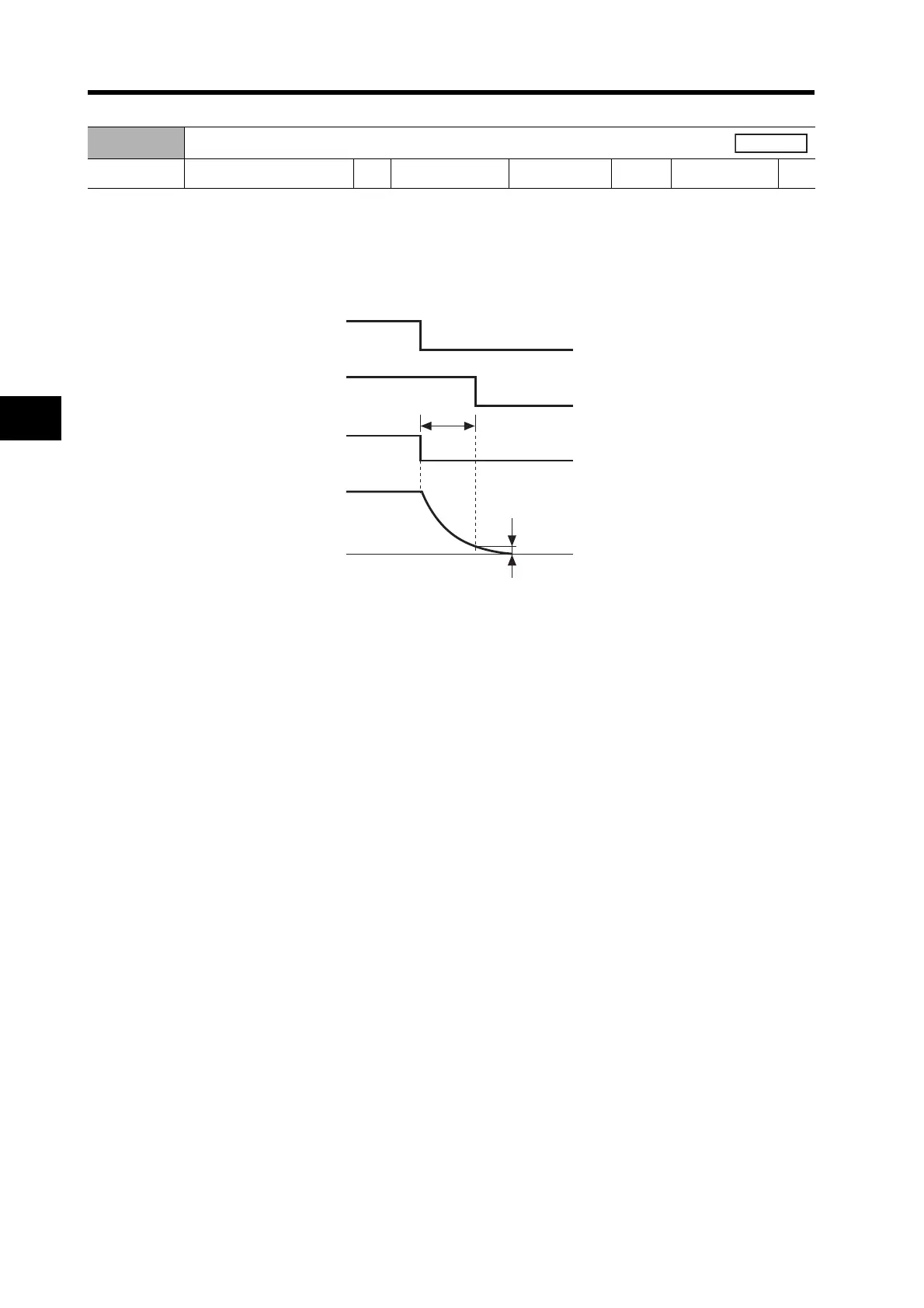
• Use this parameter to set the brake timing from when the RUN Command Input (RUN: CN1 pin
29) is detected to be OFF until the Brake Interlock Output (BKIRCOM: CN1 pin 10, BKIR: CN1 pin
11) turns OFF when Servo OFF status is entered while the Servomotor is operating.
When the RUN Command Input is turned OFF while the Servomotor is operating, the Servomo-
tor will decelerate reducing the number of rotations, and the Brake Interlock Signal (BKIR) will
turn OFF after the time set for this parameter has elapsed (setting × 2 ms).
“TB” in the above figure is the brake timing during operation (setting × 2 ms) or the time until the
speed of the Servomotor falls to 30 r/min or lower, whichever is shorter.
• Refer to 5-10 Brake Interlock on page 5-21 for more information.
Pn6B
Brake Timing during Operation
Setting range 0 to 100 Unit 2 ms Default setting 50
Power OFF→ON
---
TB
30 r/min
RUN Command (RUN)
Brake Interlock (BKIR)
Servomotor ON/OFF status
Servomotor speed
Released
ON
Hold
OFF

 Loading...
Loading...

