7-7
7-2 Realtime Autotuning
7
Adjustment Functions
Fit Gain Function
OMNUC G-Series products include a a fit gain function that automatically sets the rigidity to match
the device when realtime autotuning is used at position control. A fully automatic search is
performed for the optimal rigidity setting by repeating a specified reciprocating operation with
position control.
• In addition to the precautions for realtime autotuning, be aware of the following conditions under
which operation may not be performed correctly. If that occurs, use normal realtime autotuning.
• To be applicable, this function must satisfy the following conditions in
addition to the conditions for realtime autotuning.
Conditions under which the fit gain functions properly
Realtime
autotuning
operation
• The realtime autotuning operates normally.
• The Servo is ON.
• Pn21= 1 to 6. (Operation is not possible if Pn21 is 0 or 7.)
Adaptive filter
• The adaptive filter is enabled.
Pn23 = 1: Enabled
Control mode
• The control mode is position control.
Pn02 = 0: Position control
Pn02 = 3: First control mode for position/speed control
Pn02 = 4: First control mode for position/torque control
Operating
pattern
• The position command is for reciprocating operation.
• The time per position command is at least 50 ms.
• The minimum frequency for the position command is 1 kpps.
(Required to determine the start and end of the command.)
Conditions under which the fit gain does not function properly
Operating
pattern
• One position command is too short, i.e., less than two revolutions.
• Positioning is not completed after the position command is completed and before
the next position command starts.
• The acceleration/deceleration is sudden, i.e., 3,000 r/min/0.1 s.
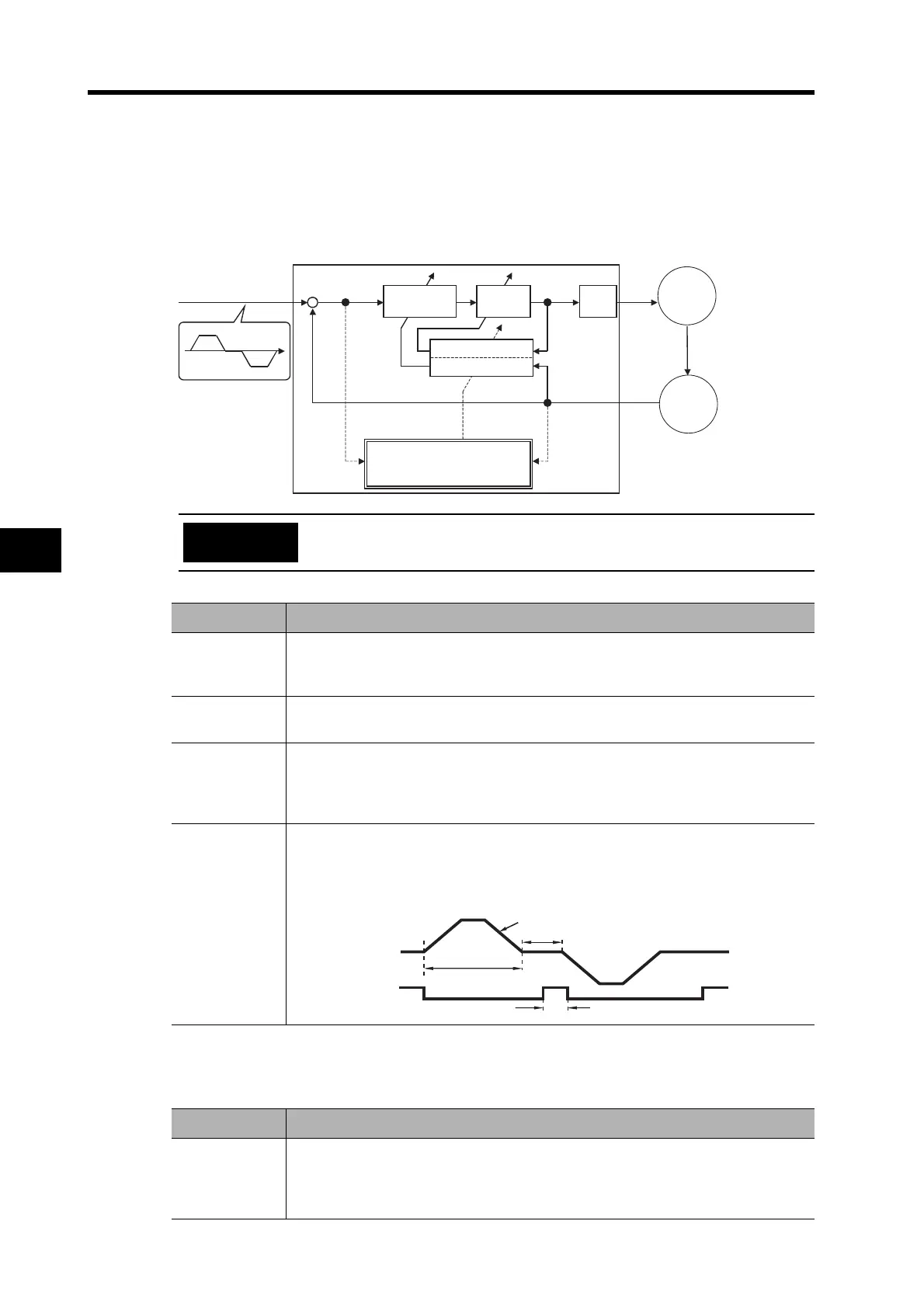
Position command
(reciprocating
command
for trapezoidal
speed waveform)
Servo Drive
Servo-
motor
current
Servo-
motor
speed
Servo-
motor
Encoder
Current
control
Torque
command
Adaptive
filter
Position/
speed control
(Vibration
detection)
Fit gain function
(Stabilization
time)
Position
deviation
+
−
Estimated resonance
frequency
Estimated load inertia
Realtime autotuning
Automatic setting of
rigidity and gain table
Precautions
for Correct Use
50 ms min.
1 s min.
OFF
ON
Command
waveform
Positioning
completed
1 s min.
Acceleration/deceleration
≤
(3,000 r/min/0.1 s)

 Loading...
Loading...

