Commands the VG10 to idle the selected channel. When a channel is in idle, the power
consumption is slightly lower, but parts may 'stick' to the suction cup as the air return
channel is closed.
channel: Tells which channel to be in idle.
•
0 = Channel A
•
1 = Channel B
•
2 = Channel A and Channel B
If only one VG10 gripper is attached, use:
tool_index=vg_index_get()
If two VG10 grippers are attached, use:
For primary:
tool_index=1
For secondary:
tool_index=2
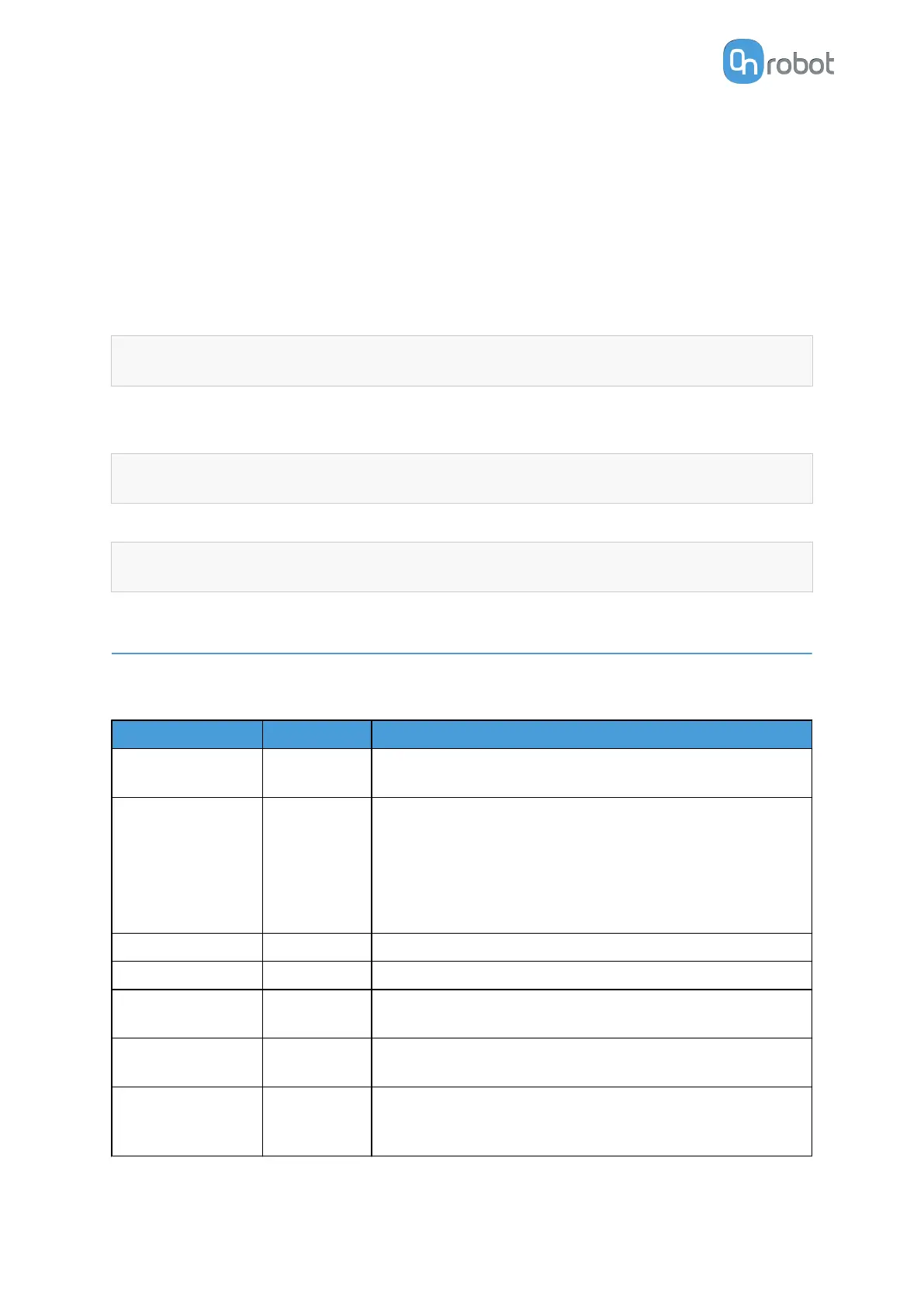
5.4. Feedback Variables
5.4.1. Eyes
Feedback Variable
Unit Description
EyeLndmarkDet p[x,y,z,rx,ry,rz]
Latest detected Landmark pose with respect to robot
base frame.
EyesInspectEval -
The evaluation result is one of the following:
0 - indicates that an error occurred during the inspection.
1 - indicates that the inspection has passed (match % is
higher than the one defined in the Eyes Inspection Task).
2 - indicates that the insepection has failed.
EyesLndmrkFeat p[x,y,z,rx,ry,rz] Pose of the feature point associated to Landmark.
EyesLndmrkOrig p[x,y,z,rx,ry,rz] Original Landmark pose with respect to robot base frame.
EyesLocatePose p[x,y,z,rx,ry,rz]
Coordinates of the position where the located workpiece
is placed.
EyesMatch %
Match percentage between the workpiece's model and
the one in used as defined in the Eyes Inspection Task.
EyesWorkpCount -
Number of detected workpieces located by the Eyes Part
Location or the Eyes Inspection Tasks. It is only updated
after the EyesGetWorkpiece command is executed.
OPERATION
142