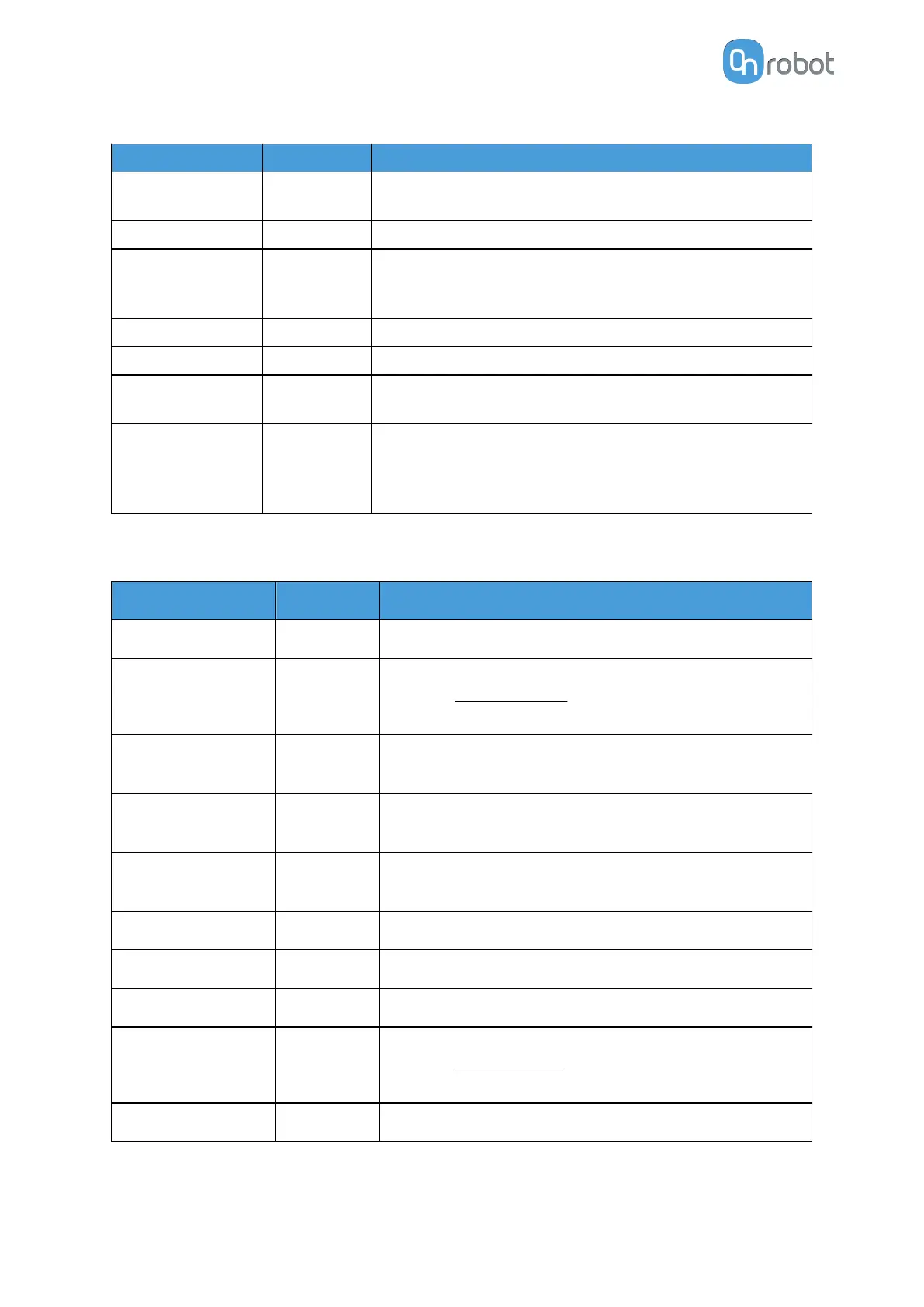
Feedback Variable Unit Description
EyesWorkpiece -
Detected workpiece’s type as defined in the Eyes Part
Location or Eyes Inspection Tasks.
eyes_lmk_pose p[x,y,z,rx,ry,rz] Latest detected landmark pose.
eyes_workp_cnt -
Number of detected workpieces located by the Eyes Part
Location or the Eyes Inspection Tasks. It is only updated
after the EyesGetWorkpiece command is executed.
eyes_workp_pose p[x,y,z,rx,ry,rz] Pose of latest detected workpiece.
eyes_workp_type - Type of the latest detected workpiece.
eyes_lmk_ok True/False
True if the latest detection of the Landmark application
was successful, False otherwise.
eyes_cnt -
Total number of detected workpieces located by the Eyes
Part Location or the Eyes Inspection Tasks. It is updated
after the Eyes Locate or the Eyes Inspect commands are
executed.
5.4.2. HEX-E/H QC
Feedback Variable
Unit Description
on_return The return value for the OnRobot commands
F3D [N] Length of the 3D force vector
F3D = √ Fx² + Fy² + Fz²
HEX_Average_F3D [N] Low-pass filtered (1Hz) F3D that can be used to have a
noise-free signal.
FT_Base [3xN,3xNm] Force and torque values calculated in the Base
Coordinate system, in an array
FT_Tool [3xN,3xNm] Force and torque values calculated in the Tool
Coordinate system, in an array
Fx [N] Force value along the X axis
Fy [N] Force value along the Y axis
Fz [N] Force value along the Z axis
T3D [Nm] Length of the 3D torque vector
T3D = √ Tx² + Ty² + Tz²
Tx [Nm] Torque value about the X axis
OPERATION
143