EyesLndmrkDet: Latest detected Landmark pose with respect to robot base frame.
EyesLndmrkFeat: Pose of the feature point associated to Landmark.
EyesLndmrkOrig: Original Landmark pose with respect to robot base frame.
5.1.2. Best Practices – Eyes
This section describes general and
specific advices how to improve the performance of Eyes
during configuration.
5.1.2.1. Check Detection on the Full Workspace
Good practice:
Check that the part location and the inspection tasks give the expected results before you
finish the configuration.
•
Check all corners of the selected region of interest.
•
Check several orientations of the workpieces that Eyes will detect.
5.1.2.2. Sort Objects Using Part Location by Workpiece’s Inner Features
Part location method using workpiece’s inner features has eective sorting features. It can
sort adjacent objects and partially occluded objects. However, these features can lead to
unexpected sorting behavior when the features of one of the sorted items are also present on
the other item.
Example
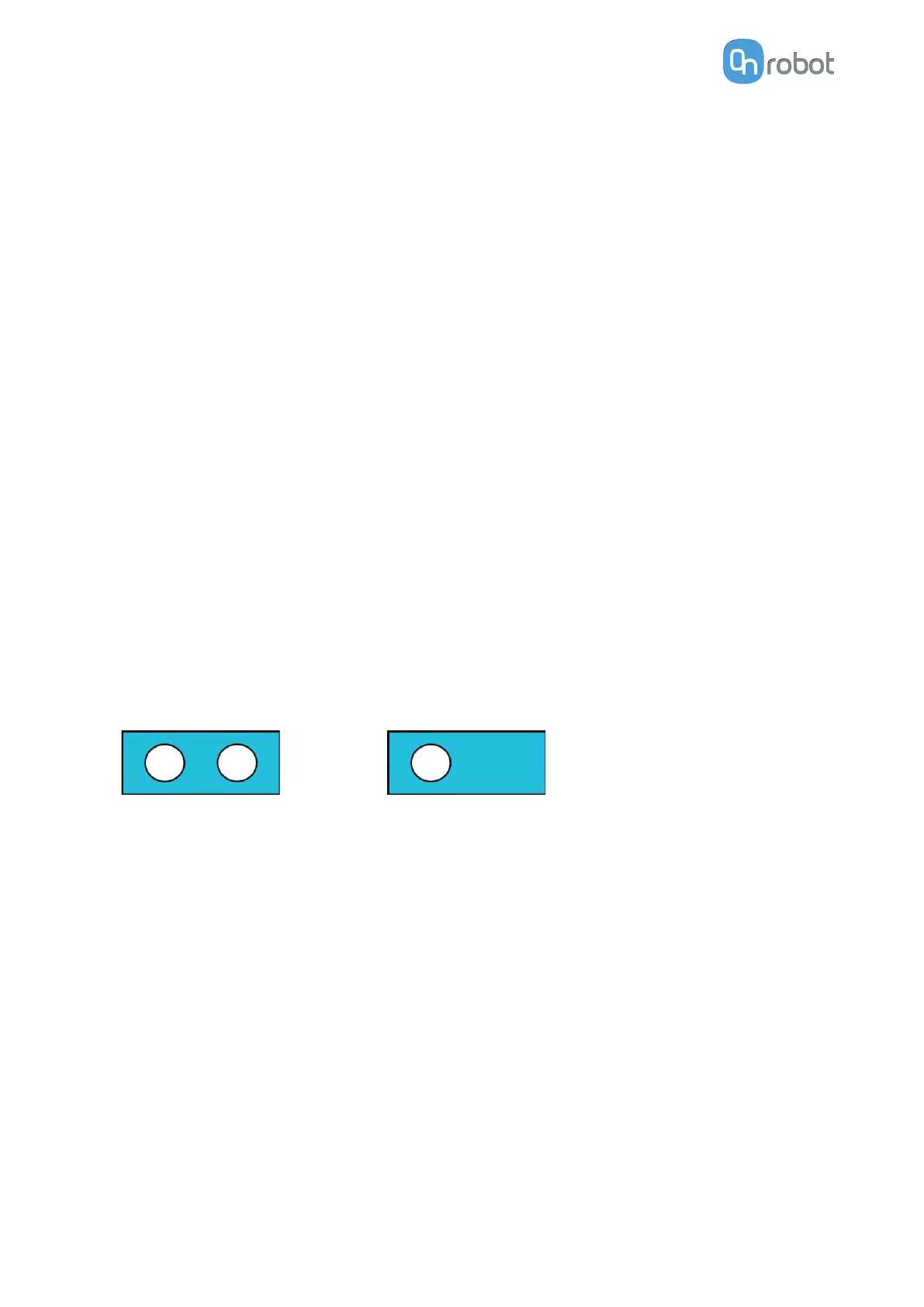
You want to pick and sort two workpieces. The taught workpieces are the following and both
of them are selected in the Eyes task
configuration:
Workpiece 1
Workpiece 2
In this case, Eyes might incorrectly classify Workpiece 1 as Workpiece 2.
However, Eyes will always correctly identify Workpiece 2, see below:
OPERATION
97