NOTE:
If an OnRobot gripper is connected, the Eyes Move will add the given gripper's
grip command to the program.
Approach oset: This distance will determine the waypoint where the robot will move to in
the
first MoveJ.
Select device
When two grippers are used, the radio buttons with the gripper’s name will appear. These
buttons will select which one of the two grippers should be used when creating the program
structure for the Eyes Pick.
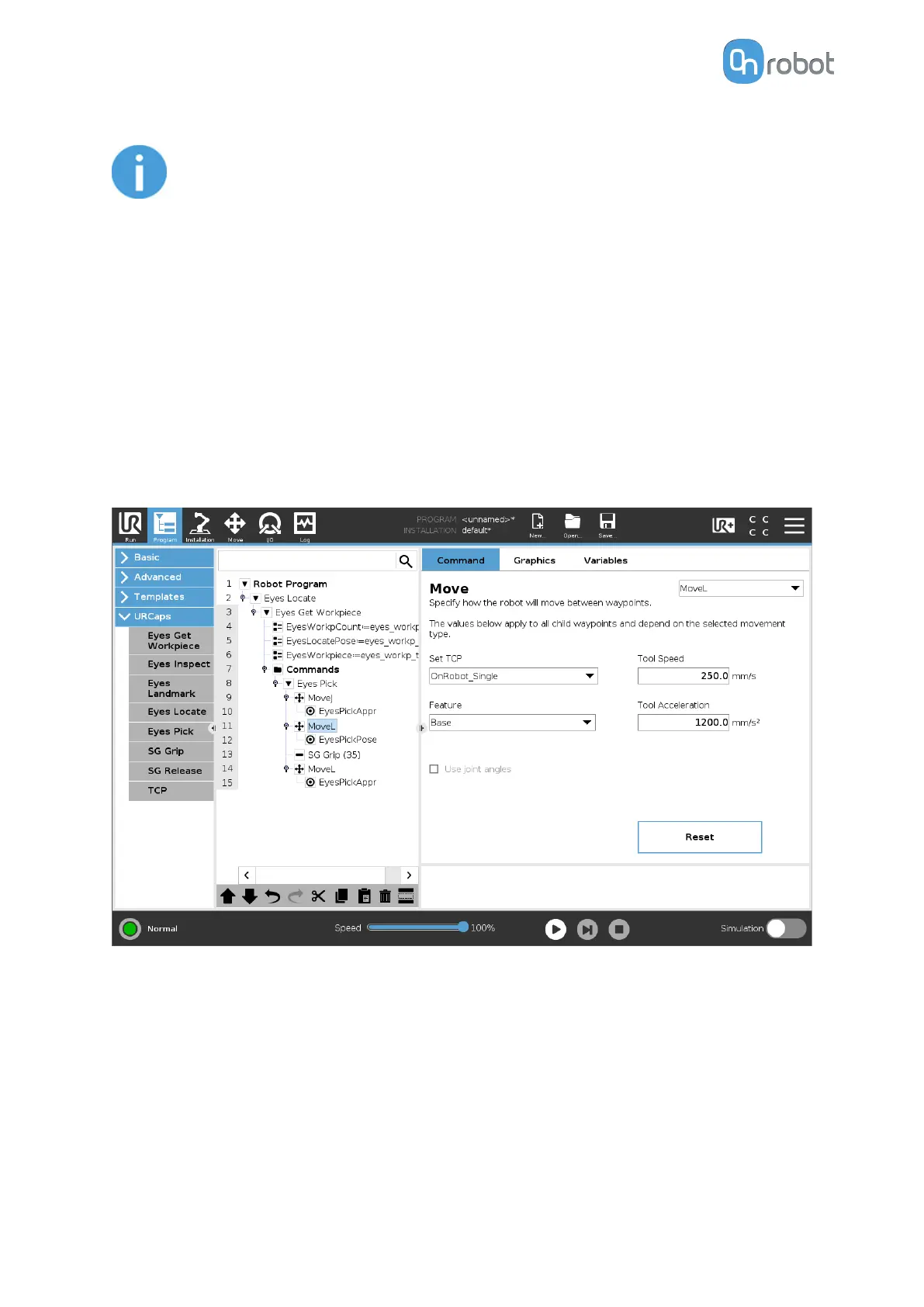
Inserted Move commands:
The inserted move commands will use the OnRobot TCP to make the motion. If the Dual QC is
used, the selected gripper option will
define which TCP is chosen for the commands.
The above is an example of the default Move that is set by the Eyes Pick. The
OnRobot_Dual_1 TCP has been chosen.
The Waypoint shown below uses the variable EyesPickPose.
OPERATION
93
 Loading...
Loading...







