■
Parameter settings
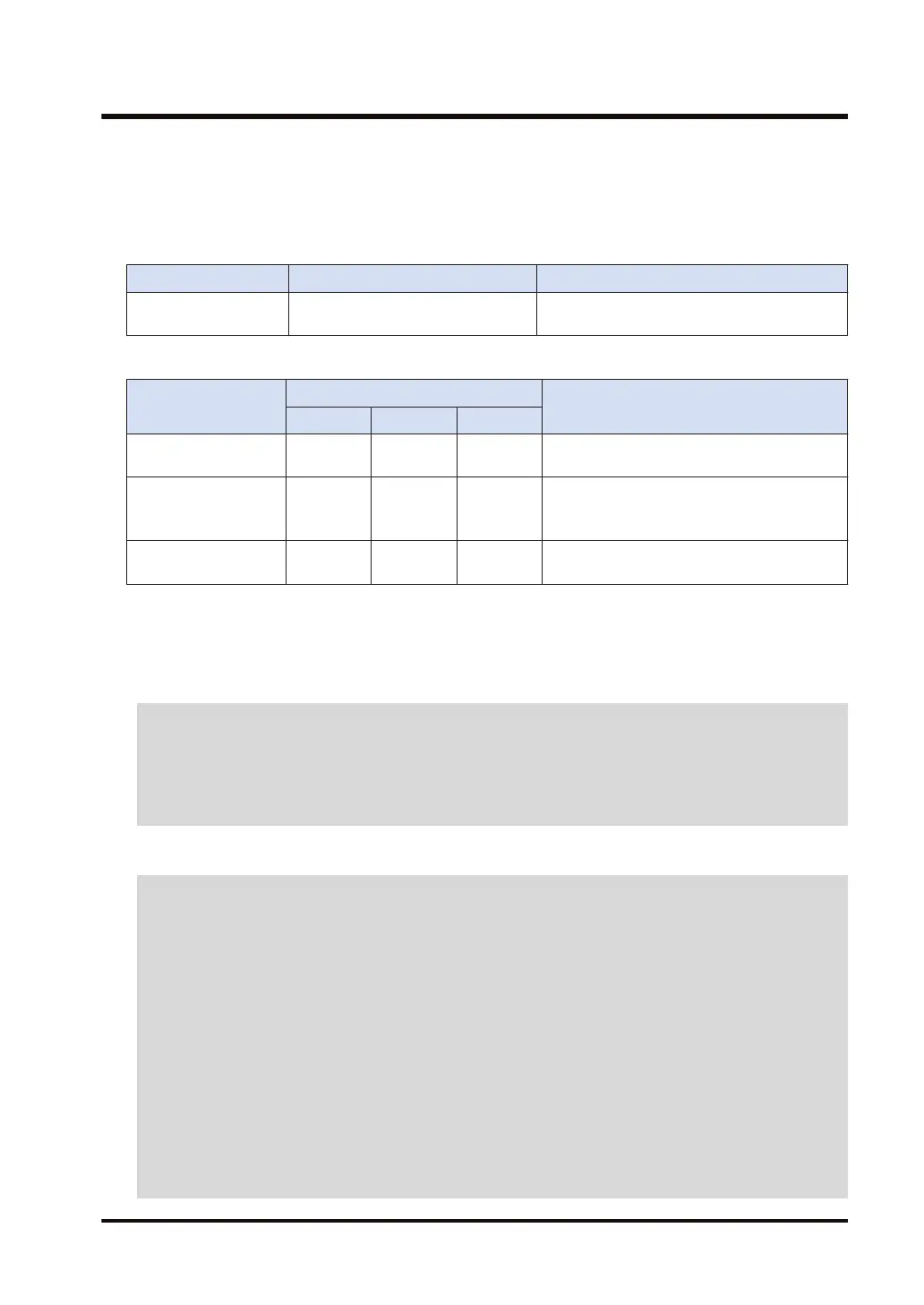
Parameters for the pulse output unit (Pulse_4Axes parameters)
Set from the GM Programmer. Double-click "Slot*_Pulse_4Axes (AGM1PG)" in the device
pane.
Parameter Set value Setting range
StartupSpeed (Startup
speed [u/s])
500 0 to 4294967295
PG_MoveRelative parameter
Parameter
Set value
Setting range
1st speed 2nd speed 3rd speed
Target speed: Velocity
[u/s]
5000 20000 500 0 to 4000000
Acceleration /
Deceleration: AccDec
[u/s
2
]
10000 10000 6000
1 or more
(Note 1)
Relative distance:
Distance [u]
5000 15000 500 -2147483648 to 2147483647
(Note 1) Set each acceleration / deceleration time to 32767 ms or less.
■
Sample program (ST)
Declaration section
PROGRAM sample
VAR
Process :UDINT := 0;
PG_Power_0: PG_Power;
PG_MoveRelative_0: PG_MoveRelative;
END_VAR
Implementation section
CASE Process OF
0://Servo On
PG_Power_0(
UnitID:=1,
AxisNo:=1,
Enable:=TRUE,
bRegulatorOn:=TRUE);
IF PG_Power_0.Status = TRUE THEN
Process := 1;
END_IF
1://Execute the 1st PG_MoveRelative
PG_MoveRelative_0(
UnitID:=1,
AxisNo:=1,
Execute:=TRUE,
Distance:= 5000,
Velocity:=5000,
7.1 Sample Program
WUME-GM1PG-01 7-3

 Loading...
Loading...