Parker Hannifin
P Series User Guide 199
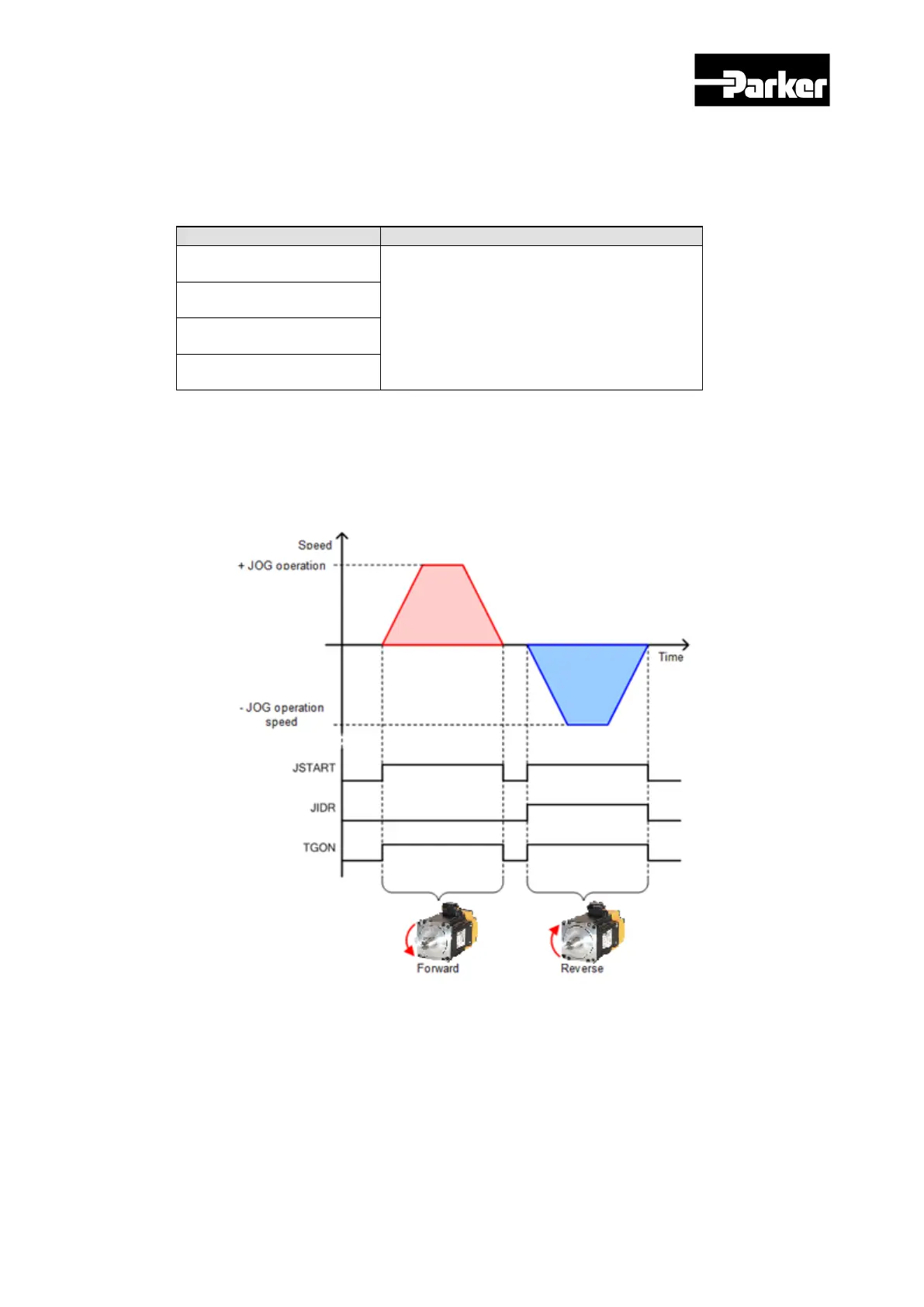
For tuning the machine or setting the original position, the motor can be rotated to any
position by JOG operation. The JSTART signal input from outside enables or suspends
JOG operation, and the JDIR signal input from outside changes the rotation direction of
the servo motor. JOG operation is performed using the speed control mode.
JOG operation speed
(0x2300)
See “ 6.6 Speed Control Setting “.
Speed command
acceleration time (0x2301)
Speed command
deceleration time(0x2302)
Speed command S-curve
time (0x2303)
Servo motor rotation direction.
 Loading...
Loading...








