PowerMeasuringModule PMM
35,0(6
51
Revision 13 EN - 02/2023
10.3 Evaluate measurement
The data generated during the measurement is stored within the variables. The measured values within the
variables can be found in chapter11.3 „Variables“ on page55.
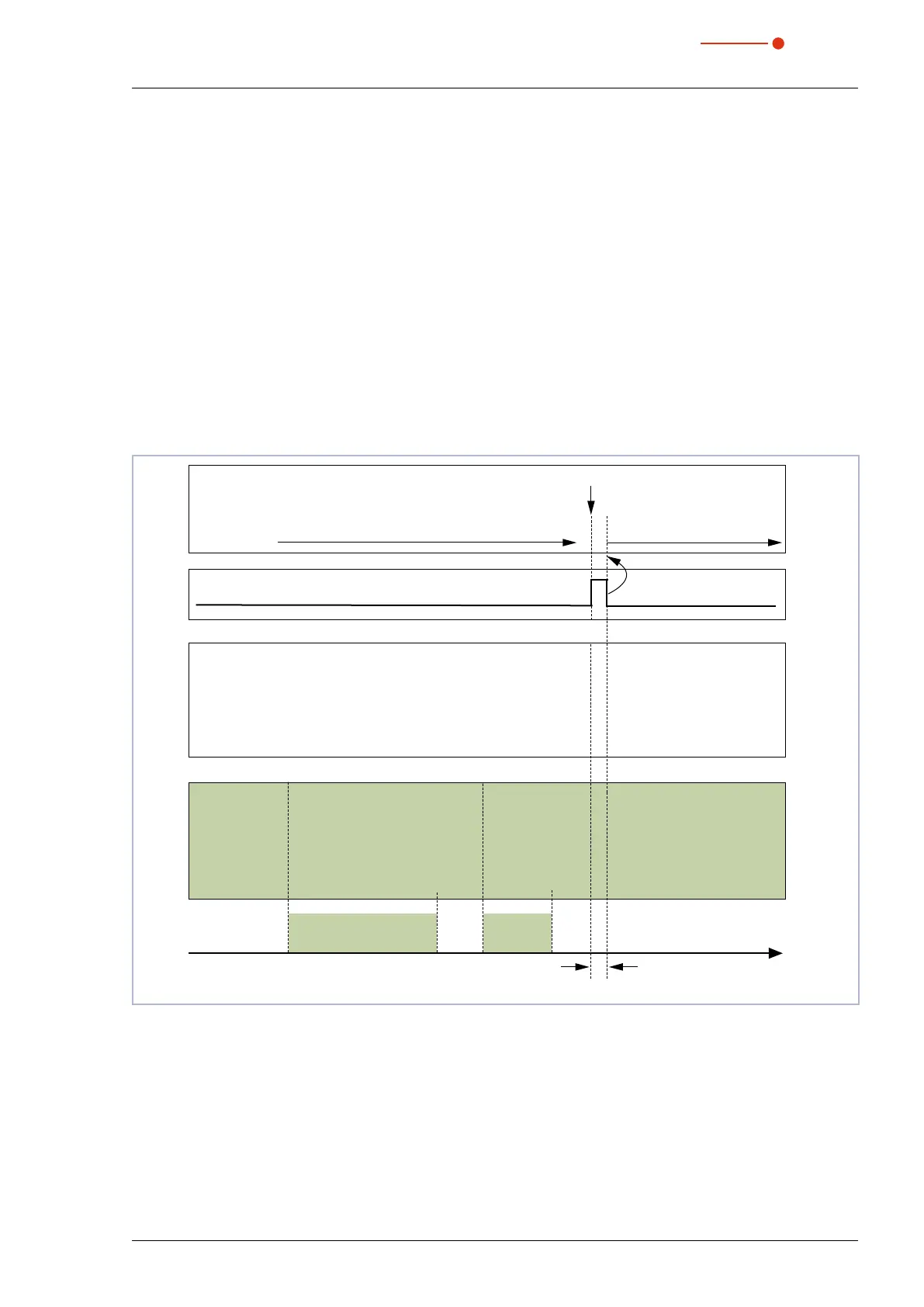
10.4 Time-optimized measuring procedure
To optimize the measurement time, the robot downtime can be reduced to the irradiation time.
Measuring procedure
1. Robot moves towards the measuring device, at the same time the shutter opens.
2. The shutter is open, start measurement.
3. Robot has reached the right position, check “Ready for Measurement”.
4. Laser pulse is activated.
5. Laser pulse is finished.
6. Robot can move away again.
7. Wait for the signal “Measurement completed”.
Laser program
Open shutter
Shutter open
Start
measurement
Waiting for pulse
Start program
Pulse recognized
Measurement
completed
Time in s
Control
Robot
PMM
Get into position Move away
< 2 < 1
Puls duration
Robot in measuring position
Program is running
Fig. 10.3: Time-optimized measuring procedure