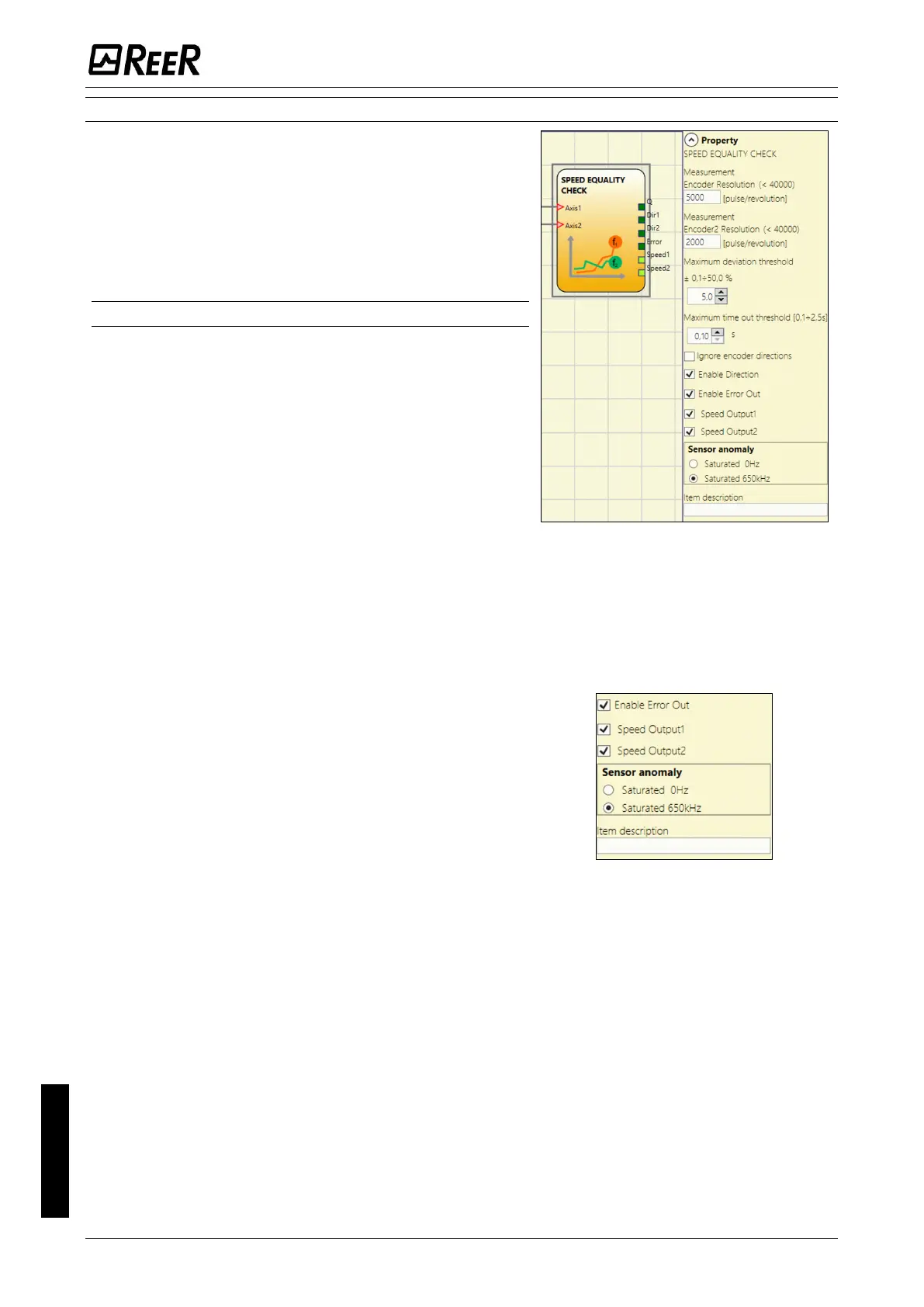
The Speed Equality Check function block monitors
the input frequency values (Axis1, Axis2) from two
encoders and checks whether they have deviation.
The operator can set the resolutions of the two
encoders, the max deviation threshold (in percent)
and the timeout of threshold.
Set output Q to 1 (TRUE) if the deviation is within the
accepted values.
Parameters
Measurement: Enter in this field the number of
pulses/revolution (in the case of rotational sensor) or
µm/pulse (linear sensor) relating to the sensor used.
Maximum deviation threshold: the operator sets the
maximum tolerated threshold within which output Q
returns 1.
Maximum time out of threshold: the operator sets the
time (in seconds) by which the measurement is out of
threshold, if the deviation is within the expected time the
output Q returns 1, if the deviation remains after the
timeout, Q goes to 0.
Ignore Encoder directions: When selected, does not
consider the direction of rotation of Axis1 and axis2, but
only their absolute value.
Enable direction: (Available only when at least one
Encoder input is present): when checked, the DIR output
is enabled on the function block. This output will be 1
(TRUE) when the axis rotates Counterclockwise and will be
0 (FALSE) when the axis rotates Clockwise.
Enable Error Out: If selected reports a fault detected by
the function block (please read the section “Warning
concerning safety”).
Speed Output1/Speed Output2: when enabled, make the
measured frequency available via the Speed1/ Speed2 output
that can be connected to a Speed Comparator, either
threshold or window. This feature allows one or more
independent thresholds to be placed on the measured
frequency.
Sensor anomaly: the parameter allows to configure the
saturation of the measured frequency in case of
unavailability of the measuring instrument
(e.g. disconnected sensor). The choice is between
saturating to the maximum value (Default=650kHz,
OVERSPEED) or to the minimum (0 Hz).

 Loading...
Loading...




