Functions
8.24 Open-loop and closed-loop control
Control Units CU240S
8-176 Operating Instructions, 11/2006, A5E00766042B AA
ದ
ದ
U U
U U
6/9&
9&
3
3
3
3
3
3
7L
7L
.S
.S
7Q
7Q
U
U
U
3,
6SHHG
FRQWUROOHU
7RUTXH
VHWSRLQW
6SHHGFRQWURO
$FWIUHTXHQF\
)UHTVHWSRLQW
3UHFRQWURO
'URRS
RQO\DFWLYHLISUHFRQWUROLVHQDEOHG3!
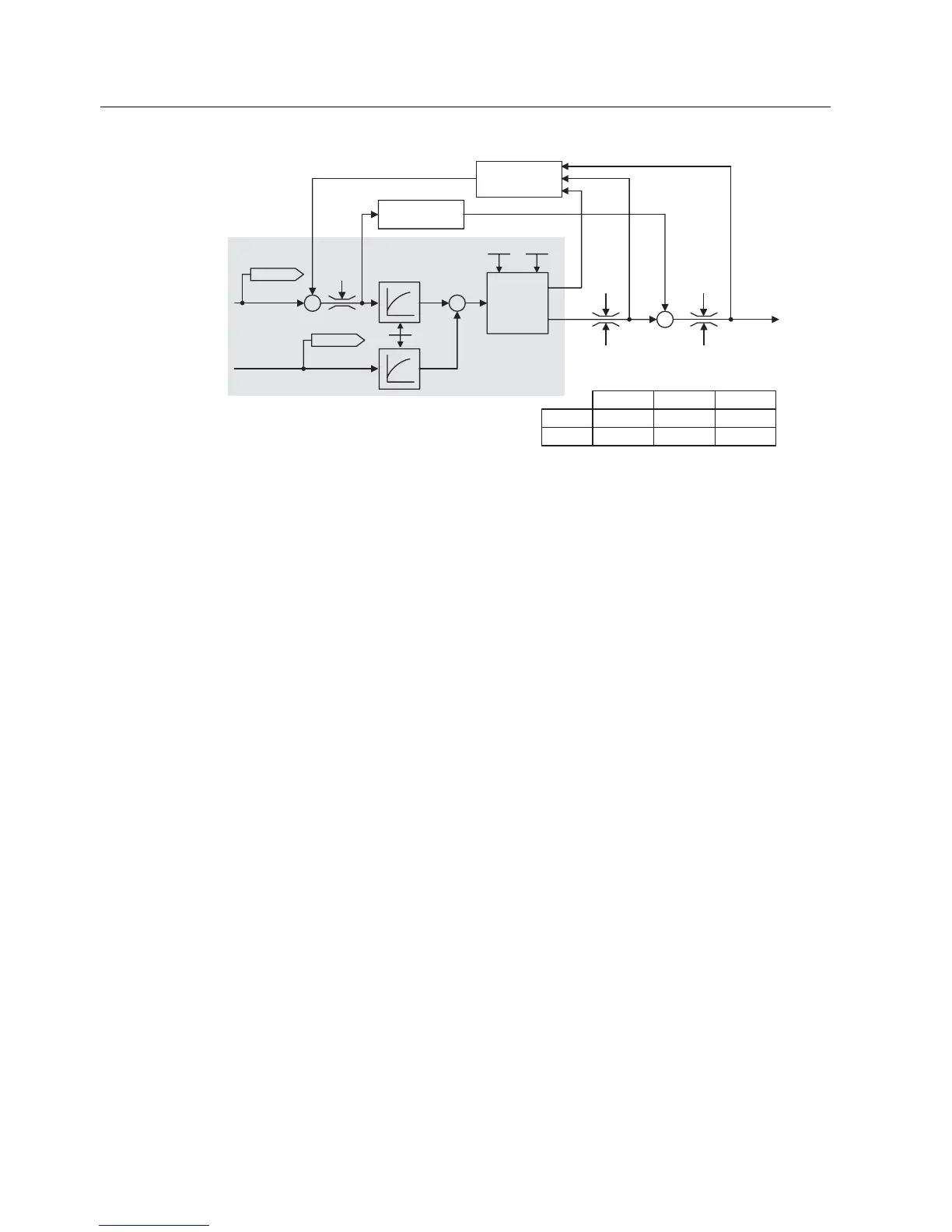
Figure 8-92 Speed controller
If the moment of inertia was entered, the speed controller (K
p
,T
n
) can be calculated using the
automatic parameterization (P0340 = 4). The controller parameters are defined according to
the symmetrical optimum as follows:
T
n
= 4 * T
σ
K
p
= ス * r0345 / T
σ
= 2 * r0345 / T
n
T
σ
= sum of the low delay times
If oscillations occur with these particular settings, then the speed controller gain K
p
should be
manually reduced. It is also possible to increase the speed actual value smoothing (this is
the usual procedure for gearbox play or high-frequency torsional oscillations) and then re-call
the controller calculation as the value is incorporated in the computation of K
p
and T
n
.
The following interrelationships apply for the optimization routine:
● If K
p
is increased then the controller becomes faster and the overshoot is reduced.
However, the signal ripple and oscillations in the speed controller loop are increased.
● If T
n
is reduced, then the controller also becomes faster. However, the overshoot
increases.
When manually adjusting the speed control, the simplest procedure is to initially define the
possible dynamic response using K
p
(and the speed actual value smoothing) in order to then
reduce the integral action time as far as possible. In this case it is important to ensure that
the closed-loop control must also remain stable in the field-weakening range.
When oscillations occur in the closed-loop speed control, it is generally sufficient to increase
the smoothing time in P1452 for SLVC or P1442 for VC (or to reduce the controller gain) in
order to dampen oscillations.
The integral output of the speed controller can be monitored using r1482 and the unlimited
controller output can be monitored using r1508 (torque setpoint).
 Loading...
Loading...






