Closed-loop thyristor current control
5-36 System- and communication configuring D7-SYS - SIMADYN D
Edition 06.2002
CSP. Significance Value\connection
GLI
Gradient for the setpoint smoothing
The actual value from WC is used for the calculation.
(Default: 0.6)
IL Gradient for the integrator inhibit (Default: 0.6)
EN Enable
SOL.QCS
→ CSP.EN
(Default: 1)
YCW Smoothed current setpoint (absolute value)
CSP.YCW
→ CPI.WC
CSP.YCW
→ CPC.WC
YE
Difference: WC – YCW (with sign)
QCL
Pos. or neg. current limit reached
QIU
Integrator inhibit of the CPI, positive values
CSP.QIU
→ CPI.ILU
QIL
Integrator inhibit of the CPI, negative values
CSP.QIL
→ CPI.ILL
ZVA Diagnostics: Status
Table 5-8 I/O CSP
5.2.6 CPC, current pre-control
Hardware address
Current setpoint (abs. value)
Discontinuous current limit
Start of the pre-control angle
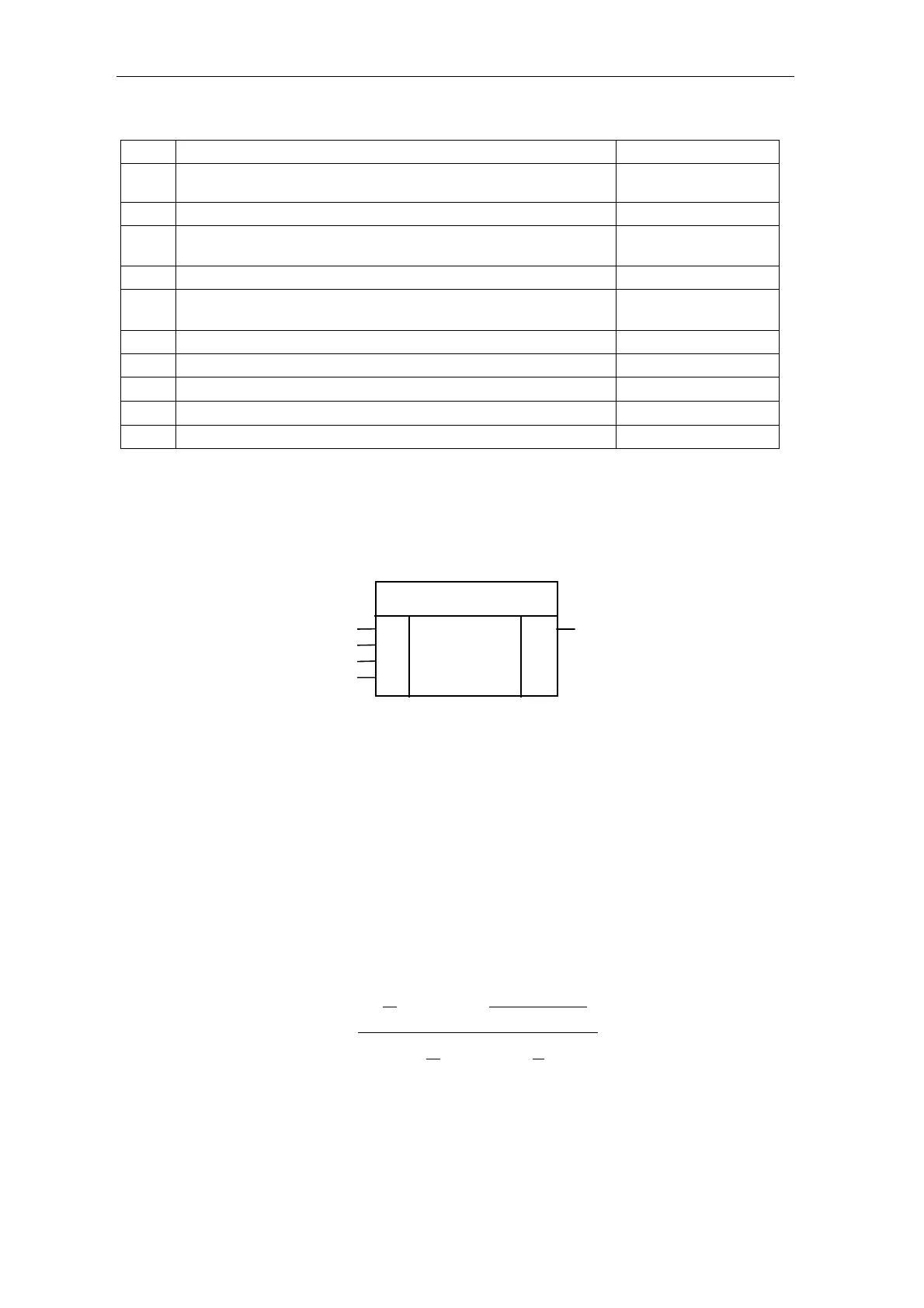
GV
R
R
R
D
WC
VCI
LP
CPC
Y R Pre-control angle [ASG]
Fig. 5-19 CSP represented in the CFC
The function block FB CPC (Current Pre-Control) calculates a pre-control
angle for the discontinuous current range from the current setpoint.
The control loop has a different behavior in the discontinuous range than
outside this range. In the discontinuous range, characteristic Vd / Id no
longer has a linear relationship. The current controller is optimized for the
continuous current range. This means that either the controller has to be
adapted, or the firing angle must be pre-controlled corresponding to the
current setpoint.
The FB calculates a pre-control angle according to the following formula:
CAVFBion normalizatcurrent internal
1
4
1
1arcsin
2
1
4
1arcsin
2
1
ALP
−=
−
−∗−
∗∗
−∗−
=
NFI
NFI
π
π
VCI
WC
Y
Function