Programmable coordinate transformations (frames)
Sometimes it is useful or necessary within an NC program, to move the originally selected
workpiece coordinate system (or the "settable zero system") to another position and, if
required, to rotate it, mirror it and/or scale it. This is performed using programmable coordinate
transformations (frames) (Page 305).
Note
Programmable coordinate transformations (frames) always refer to the "settable zero system".
2.1.4.5 Workpiece coordinate system (WCS)
The geometry of a workpiece is described in the workpiece coordinate system (WCS). In other
words, the data in the NC program refers to the workpiece coordinate system.
The workpiece coordinate system is always a Cartesian coordinate system and assigned to a
specific workpiece.
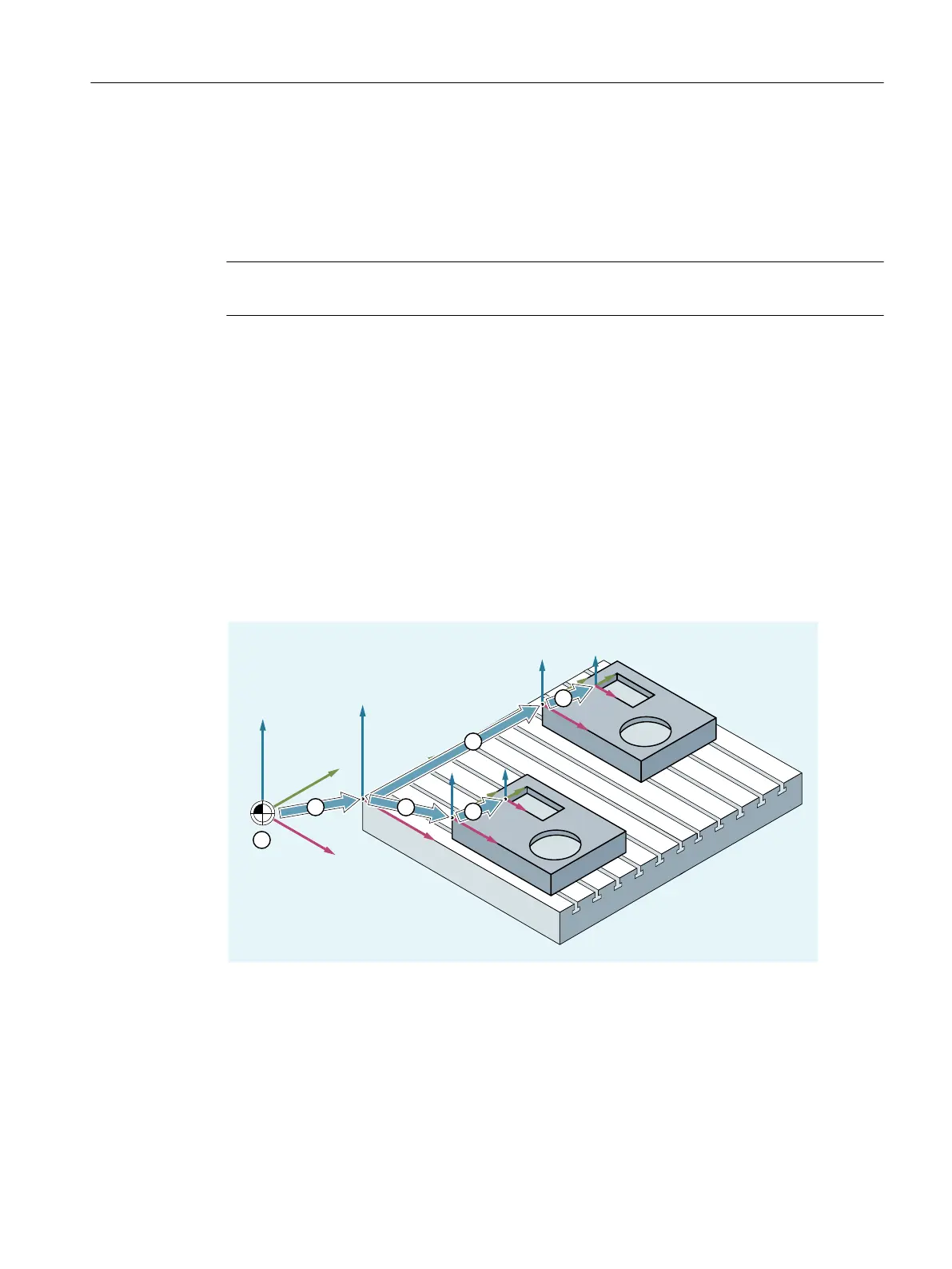
2.1.4.6 What is the relationship between the various coordinate systems?
The following example should help clarify the relationships between the various coordinate
systems:
① A kinematic transformation is not active. This means that the machine coordinate system and the
basic coordinate system coincide.
② The basic zero system (BZS) with the pallet zero are obtained from the basic offset.
③ The settable work offset G54 or G55 specifies the "settable zero system" (SZS) for workpiece 1
or workpiece 2 respectively.
④ The workpiece coordinate system (WCS) results from the programmable coordinate transfor‐
mation.
Fundamentals
2.1 Fundamental Geometrical Principles
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 41
 Loading...
Loading...














