3.14.2 Acceleration behavior
3.14.2.1 Acceleration mode (BRISK, BRISKA, SOFT, SOFTA, DRIVE, DRIVEA)
The following part program commands are available for programming the current acceleration
mode:
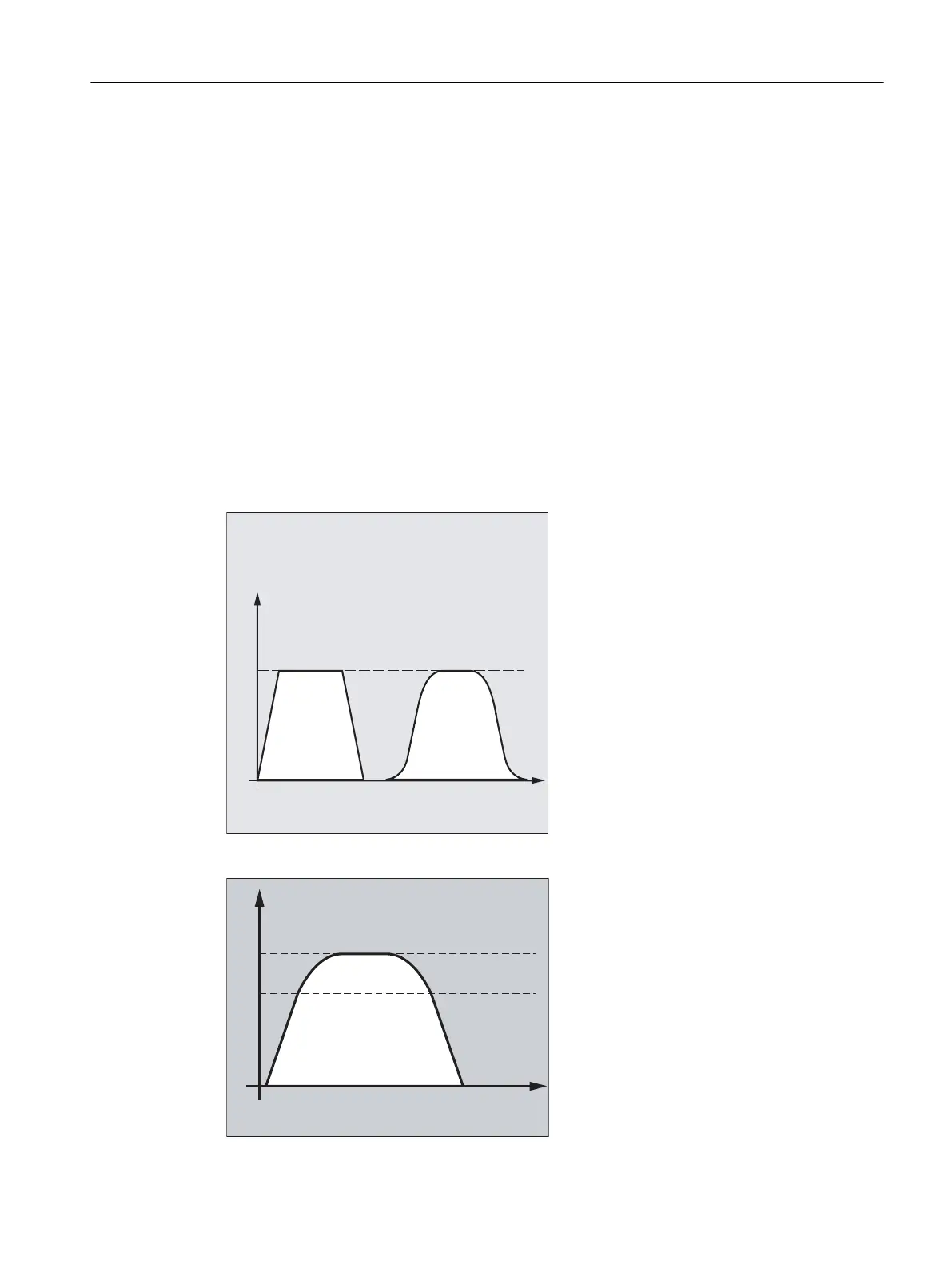
● "BRISK, BRISKA"
The single axes or the path axes traverse with maximum acceleration until the programmed
feedrate is reached (acceleration without jerk limitation).
● "SOFT, SOFTA"
The single axes or the path axes traverse with constant acceleration until the programmed
feedrate is reached (acceleration with jerk limitation).
● "DRIVE, DRIVEA"
The single axes or the path axes traverse with maximum acceleration up to a programmed
velocity limit (MD setting!). The acceleration rate is then reduced (MD setting) until the
programmed feedrate is reached.
%5,6.
WLPH
RSWLPL]HG
62)7
SURWHFWLQJWKH
PHFKDQLFDO
V\VWHP
6HWSRLQW
3DWKYHORFLW\
7LPH
Figure 3-12 Path velocity curve with BRISK and SOFT
3DWKYHORFLW\
7LPH
/LPLWRI
FRQVWDQW
DFFHOHUDWLRQ
6HWSRLQW
Work preparation
3.14 Path traversing behavior
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 839
 Loading...
Loading...














