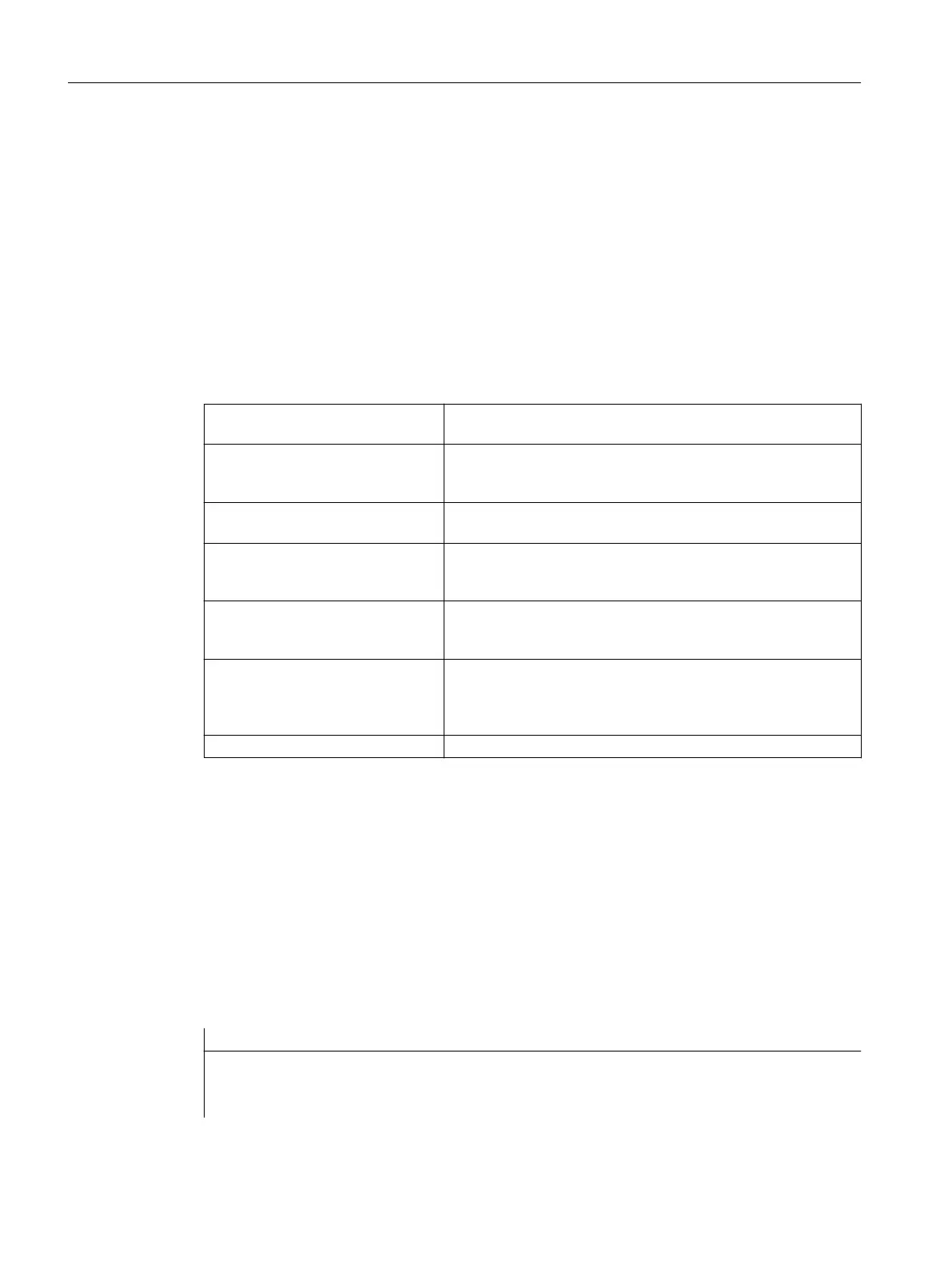
Figure 3-13 Path velocity curve with DRIVE
Syntax
BRISK
BRISKA(<axis1>,<axis2>,…)
SOFT
SOFTA(<axis1>,<axis2>,…)
DRIVE
DRIVEA(<axis1>,<axis2>,…)
Meaning
BRISK: Command for activating the "acceleration without jerk limitation"
for the path axes.
BRISKA: Command for activating the "acceleration without jerk limitation"
for single axis movements (JOG, JOG/INC, positioning axis, os‐
cillating axis, etc.).
SOFT: Command for activating the "acceleration with jerk limitation" for
the path axes.
SOFTA: Command for activating the "acceleration with jerk limitation" for
single axis movements (JOG, JOG/INC, positioning axis, oscil‐
lating axis, etc.).
DRIVE: Command for activating the reduced acceleration above a con‐
figured velocity limit (MD35220 $MA_ACCEL_REDUC‐
TION_SPEED_POINT) for the path axes.
DRIVEA: Command for activating the reduced acceleration above a con‐
figured velocity limit (MD35220 $MA_ACCEL_REDUC‐
TION_SPEED_POINT) for single axis movements (JOG, JOG/
INC, positioning axis, oscillating axis, etc.).
(<axis1>,<axis2>, etc.): Single axes for which the called acceleration mode is to apply.
Supplementary conditions
Changing acceleration mode during machining
If the acceleration mode is changed in a part program during machining (BRISK ↔ SOFT), then
there is a block change with exact stop at the end of the block during the transition even with
continuous-path mode.
Examples
Example 1: SOFT and BRISKA
Program code
N10 G1 X… Y… F900 SOFT
N20 BRISKA(AX5,AX6)
...
Work preparation
3.14 Path traversing behavior
NC programming
840 Programming Manual, 12/2019, 6FC5398-2EP40-0BA0
 Loading...
Loading...














