utotrim HI
Rudder lim HI
Displacement
Planing
0.5
1.4
40
20
0.35
1
40
20
0.3
1.4
40
20
0.2
1
40
20
Use PORT and
STBD buttons to
step through
parameters
LOw speed
Own boat
Autotune Manual
Rudder WORK
0.5 0.3
STBDPORT
Note ! The values in the table are factory set and listed for information only. After
having performed the Autotune, the values may differ from those listed in the
table. It is recommended that you write down the parameters "learned" by
the Autotune prior to making any adjustments.
The two most important parameters that determine the performance of the
automatic steering are Rudder and Counter Rudder.
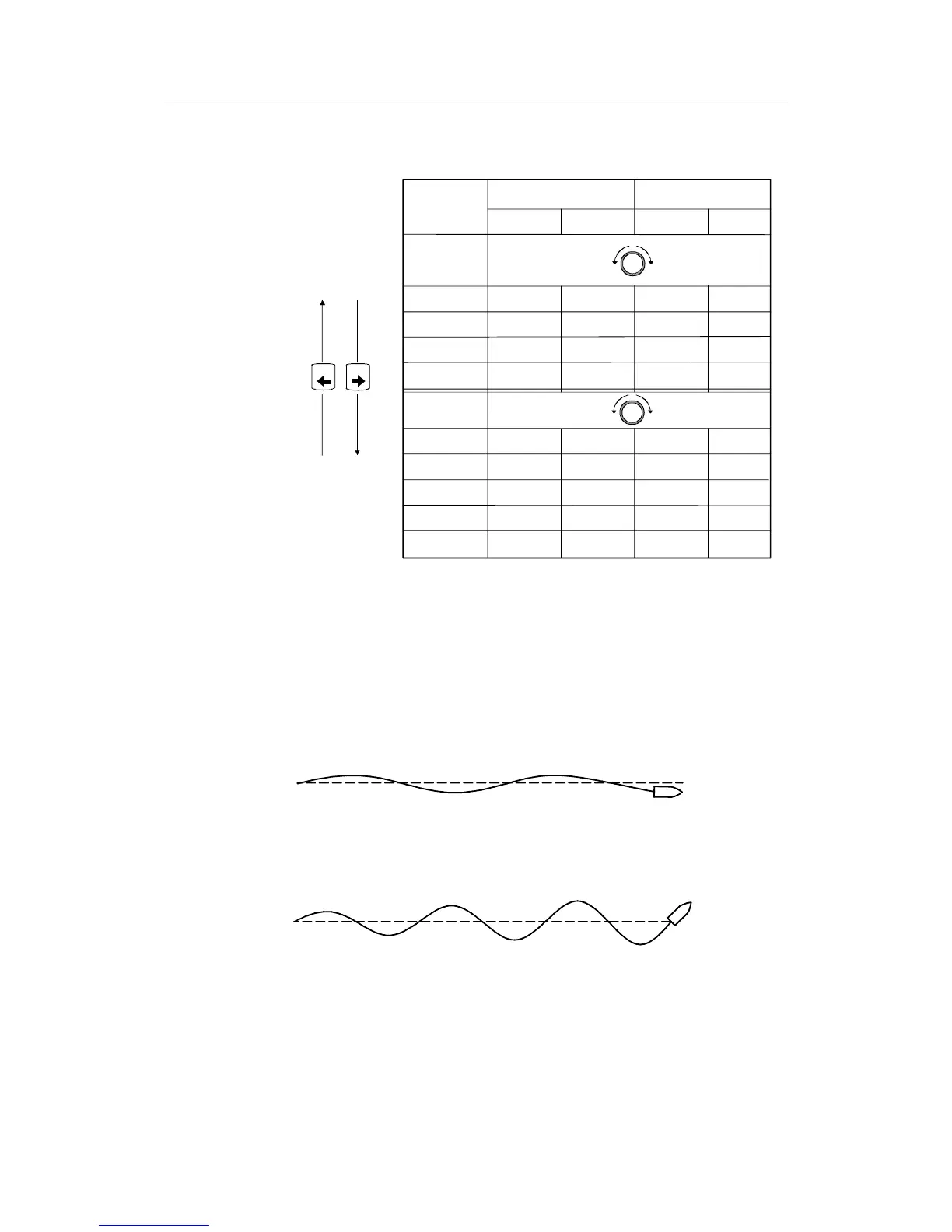
Rudder sets the rudder gain which is the ratio between the commanded
angle and the heading error ( P-factor).
• Too little Rudder and the autopilot fails to keep a steady course.
• Too much Rudder gives unstable steering and reduces speed.
• Low speed requires more rudder than high speed.
Too little rudder
Too much rudder
Course to steer
Course to steer