7.4.3 Sensor Setup
All of the required information (time message and motion data) from the INS stack, except for the
PPS, is transferred internally. However, in the Sensor setup the Interface type and Ethernet
configuration has to be set up to receive the internal information. The GPS and Motion interface
type is set to Ethernet. The IP that the POS/MV stack sends data out is 10.0.0.44 and uses UDP port
5606, which is unique for R2Sonic requirements. The POS/MV Ethernet data, going to the data
collection computer, is on the same IP (10.0.1.102), as the sonar data and uses the standard
POS/MV UDP 5602. If the data collection software requires the IP address of the ‘talker’, the
POS/MV stack outputs on IP 10.0.0.44.
Figure 112: Sensor setup for SIMINS
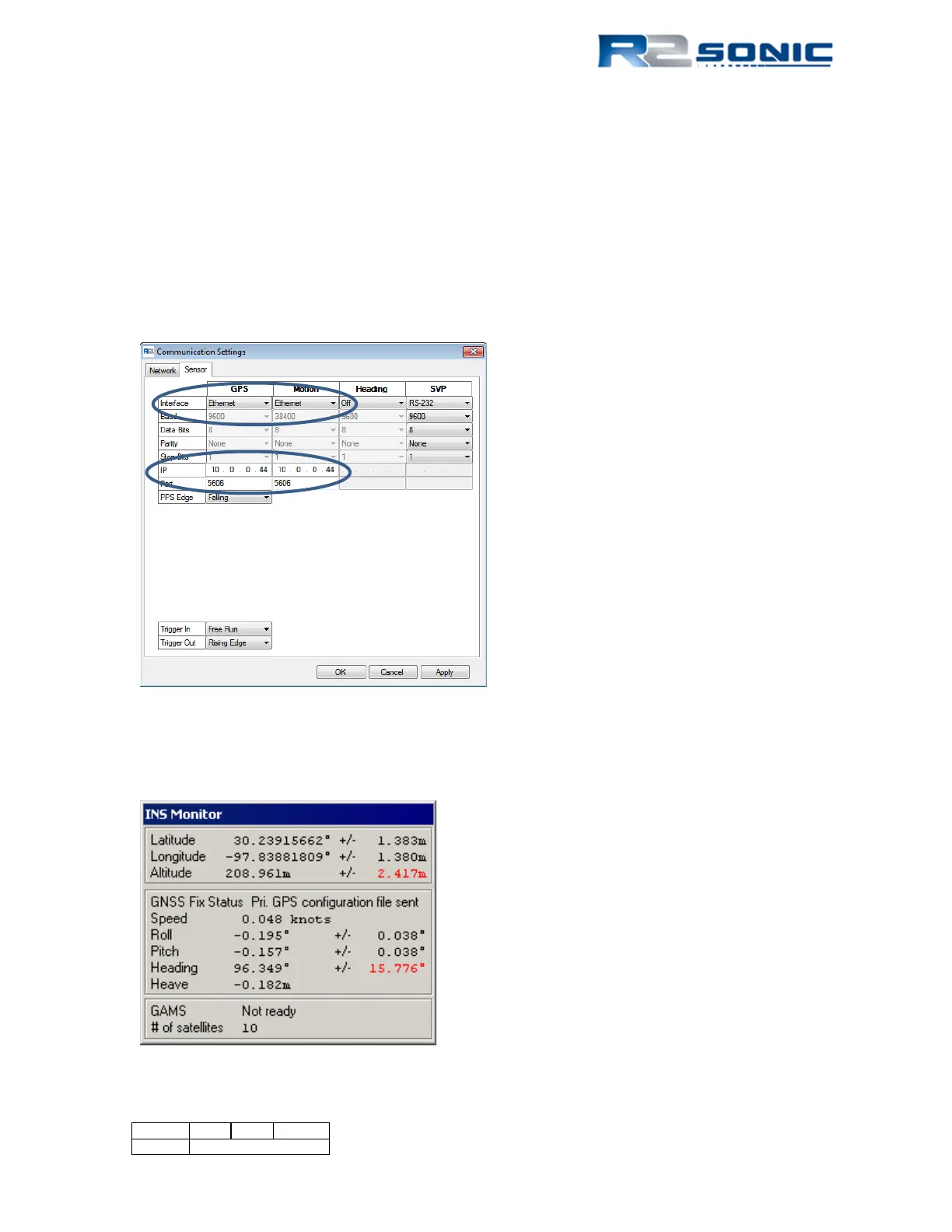
7.4.4 INS Monitor (Alt+I)
INS data can be monitor through the INS monitor. The INS monitor option is under Status.
Figure 113: INS Monitor
The INS Monitor allows the user to
constantly monitor the values from the
INS.
The accuracy limits are preset and
independent of the settings in POSView:
Roll & Pitch: 0.050°
Heading: 0.050°
Latitude/Longitude: 2.000m
Altitude: 2.000m
Page 99 of 210
Version 5.0 Rev r002
Date 05-08-2014