5.4 Position Control
5-39
5.4.5 Smoothing
Applying a filter to a reference pulse input, this function provides smooth servomotor operation in the follow-
ing cases.
• When the host controller that outputs a reference cannot perform acceleration/deceleration processing.
• When the reference pulse frequency is too low.
Note: This function does not affect the travel distance (i.e., the number of reference pulses).
Related Parameters
Set the following filter-related parameters.
Change the setting while there is no reference pulse input and the servomotor stops.
∗ When set to 0, a filter becomes ineffective.
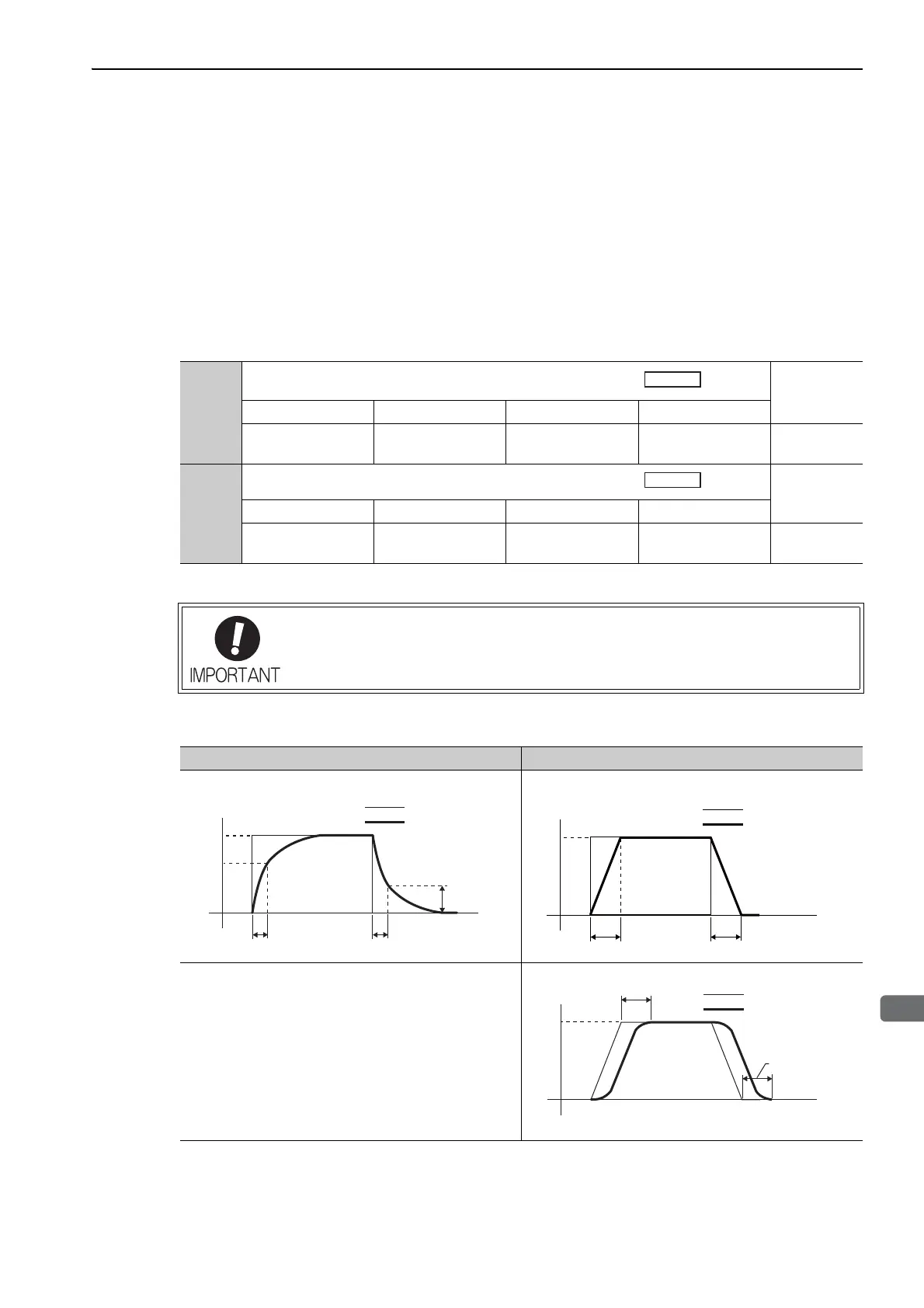
Note: The difference between the position reference acceleration/deceleration time constant (Pn216) and the average
movement time of position reference (Pn217) is shown below.
Pn216
Position Reference Acceleration/Deceleration Time
Constant
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 65535 0.1 ms
0
*
Immediately after the
servomotor stops
Setup
Pn217
Average Movement Time of Position Reference
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 10000 0.1 ms
0
*
Immediately after the
servomotor stops
Setup
While the servomotor is rotating, changes in Pn216 or Pn217 will not be reflected. The
changes will be effective after the servomotor comes to a stop with no reference pulse
input.
Acceleration/Deceleration Filter (Pn216) Average Movement Time Filter (Pn217)
–
100%
63.2%
36.8%
Pn216 Pn216
Reference pulse
frequency
Before filter applied
After filter applied
Time
100%
Pn217
Pn217
Before filter applied
After filter applied
Time
Reference pulse
frequency
Pn217
Pn217
100%
Before filter applied
After filter applied
Time
Reference pulse
frequency

 Loading...
Loading...





