5 Operation
5.5.2 Reference Offset Adjustment
5-44
(2) Parameter Setting
Using Pn400, set the analog voltage level for the torque reference (T-REF) that is necessary to operate the ser-
vomotor at the rated torque.
Note: A torque reference above the rated torque can be applied but it may cause an overload (high load) alarm (A.710) or
overload (low load) alarm (A.720) if excessive torque is output for a long time. Refer to 9.1.2 Troubleshooting of
Alarms.
5.5.2 Reference Offset Adjustment
In
torque
control, the servomotor may rotate at a very low speed with a voltage reference of 0 V. This occurs
because the internal reference in the multi-winding drive unit has a slight offset of a few millivolts. It is called
"offset."
If the servomotor rotates at a very low speed, the offset needs to be eliminated with the offset adjustment func-
tion.
Use either automatic adjustment or manual adjustment. Automatic adjustment uses the automatic adjustment
parameter for reference offset (Fn009). Manual adjustment uses the manual adjustment parameter for refer-
ence offset (Fn00B).
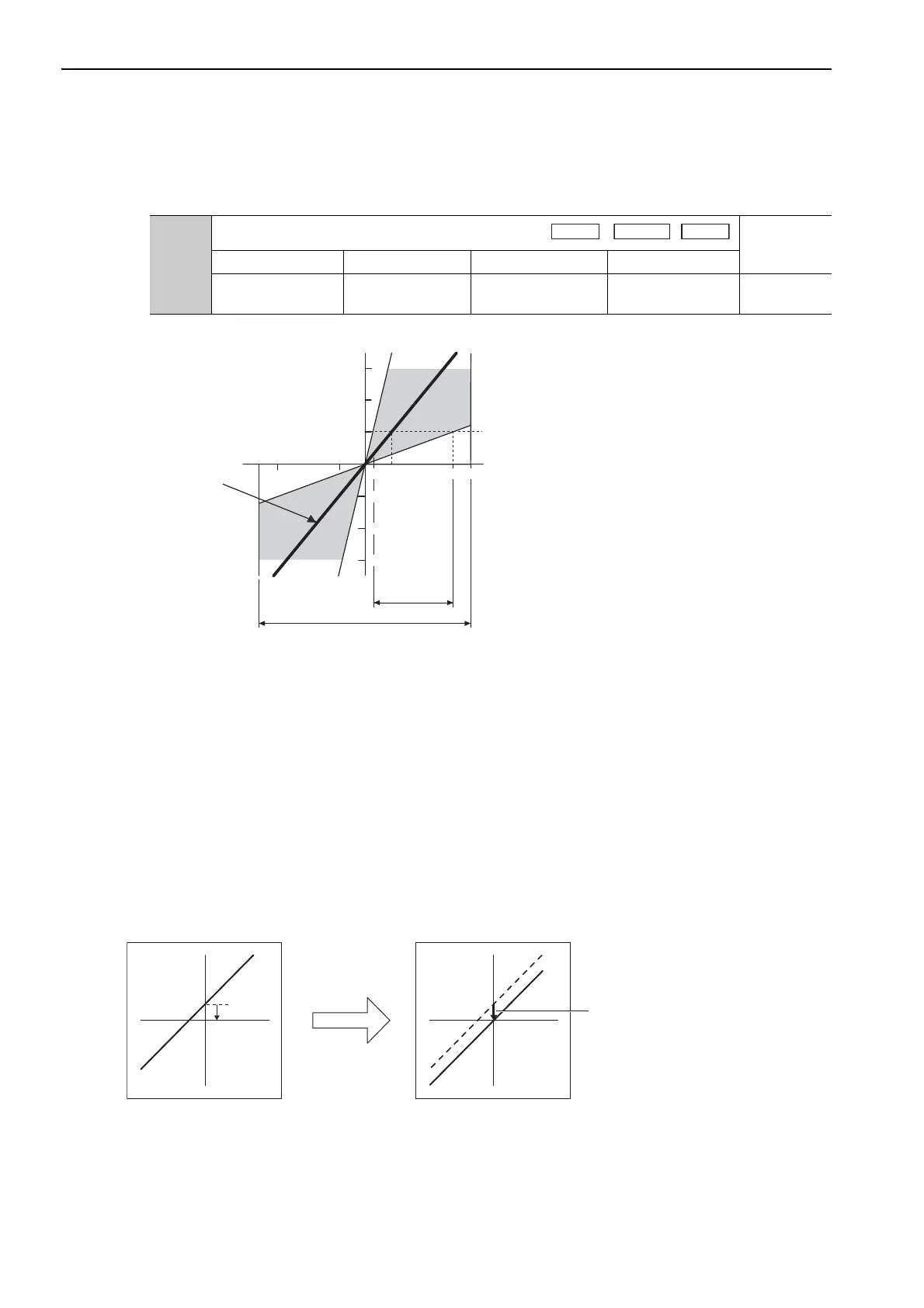
Pn400
Torque Reference Input Gain
Classification
Setting Range Setting Unit Factory Setting When Enabled
10 to 100 0.1 V/rated torque
30
(Rated torque at 3.0 V)
Immediately Setup
Speed
Position
Torque reference voltage (V)
(Rated torque)
300
200
100
-300
-200
-100
1 3 10 12
0-3-10-12
Setting range
(1.0 to 10.0 V)
Factory Setting
Output torque (%)
Input voltage range (0 to ±12 V)
Output torque Output torque
Offset
Offset adjustment
Torque
reference
voltage
Torque
reference
voltage
The offset is adjusted in the multi-winding
drive unit.
Offset Adjustment Range: -127 to +127
(Torque Reference: -1905 mV to 1905 mV
Offset Setting Unit: 15.0 mV)

 Loading...
Loading...





