8.2 Phase Control
8.2.1 Motion Parameters for Phase Control
8-8
8.2 Phase Control
Precautions When Using Σ-V or Σ-7 Series SERVOPACKs
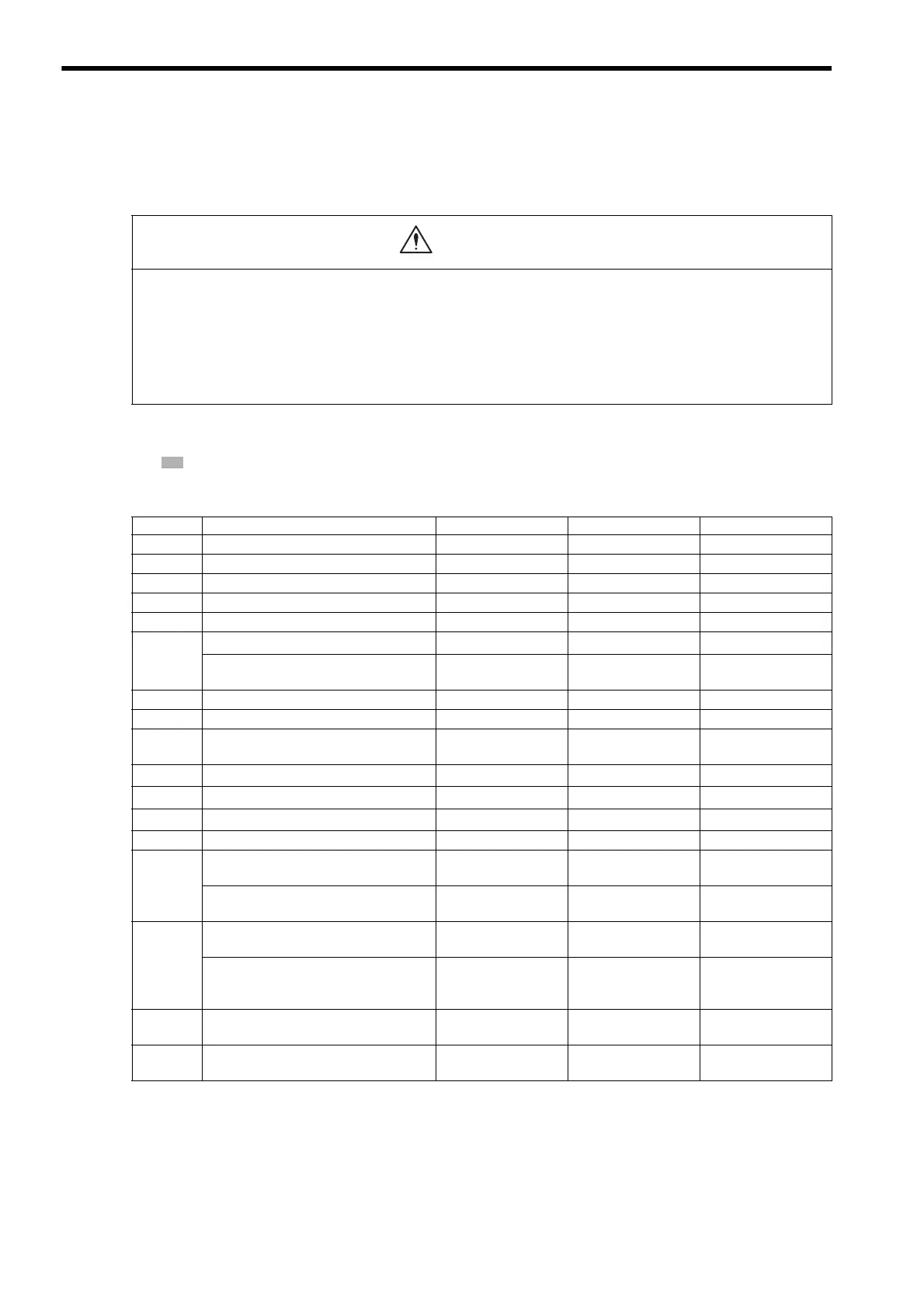
8.2.1 Motion Parameters for Phase Control
: These parameters are ignored.
( 1 ) Fixed Parameters
When the tuning or vibration suppression functions are used to perform Servo adjustments and model fol-
lowing control is enabled (i.e., when Pn140.0 = 1), the SERVOPACK cannot be properly controlled by
phase references. When using phase references, change the settings to the following values.
• Set the model-following control to disabled (Pn140.0=0).
• When using the utility functions for adjustment, select the following modes.
• Advanced Autotuning and Advanced Autotuning by References: Mode=1
• One-parameter Tuning: Tuning mode=0 or 1
No. Name Setting Unit Default Value Setting Range
0
Selection of Operation Modes
− 10 to 5
1
Function Selection Flag 1
− 0000h Bit setting
2
Function Selection Flag 2
− 0000h Bit setting
4
Reference Unit Selection
− 00 to 3
5
Number of Digits below Decimal Point
− 30 to 5
6
Travel Distance per Machine Rotation
Reference unit 10000
1 to 2
31
−1
Linear Scale Pitch
(Linear Motor)
Reference unit 10000
1 to 2
31
−1
8
Servo Motor Gear Ratio
− 1 1 to 65535
9
Machine Gear Ratio
− 1 1 to 65535
10
Infinite Length Axis Reset Position
(POSMAX)
Reference unit 360000
1 to 2
31
−1
12
Positive Software Limit Value
Reference unit
2
31
−1-2
31
to 2
31
−1
14
Negative Software Limit Value
Reference unit
-2
31
-2
31
to 2
31
−1
16
Backlash Compensation Amount
Reference unit 0
-2
31
to 2
31
−1
30
Encoder Selection
− 00 to 3
34
Rated Motor Speed
(Rotary Motor)
min
−1
3000 1 to 32000
Rated Speed
(Linear Motor)
0.1 m/s
,
0.1 mm/s
3000 1 to 32000
36
Number of Pulses per Motor Rotation
(Rotary Motor)
pulse 65536
1 to 2
31
−1
Number of Pulses per Linear Scale
Pitch
(Linear Motor)
pulses/linear scale
pitch
65536
1 to 2
31
−1
38
Maximum Number of Absolute Encod-
er Turns Rotation
Rev 65534
0 to 2
31
−1
42
Feedback Speed Moving Average
Time Constant
ms 10 0 to 32
 Loading...
Loading...









