11.6 Parameters That Are Automatically Updated
11.6.4 Parameters Updated when a Motion Command Is Executed
11-25
11.6.4 Parameters Updated when a Motion Command Is Executed
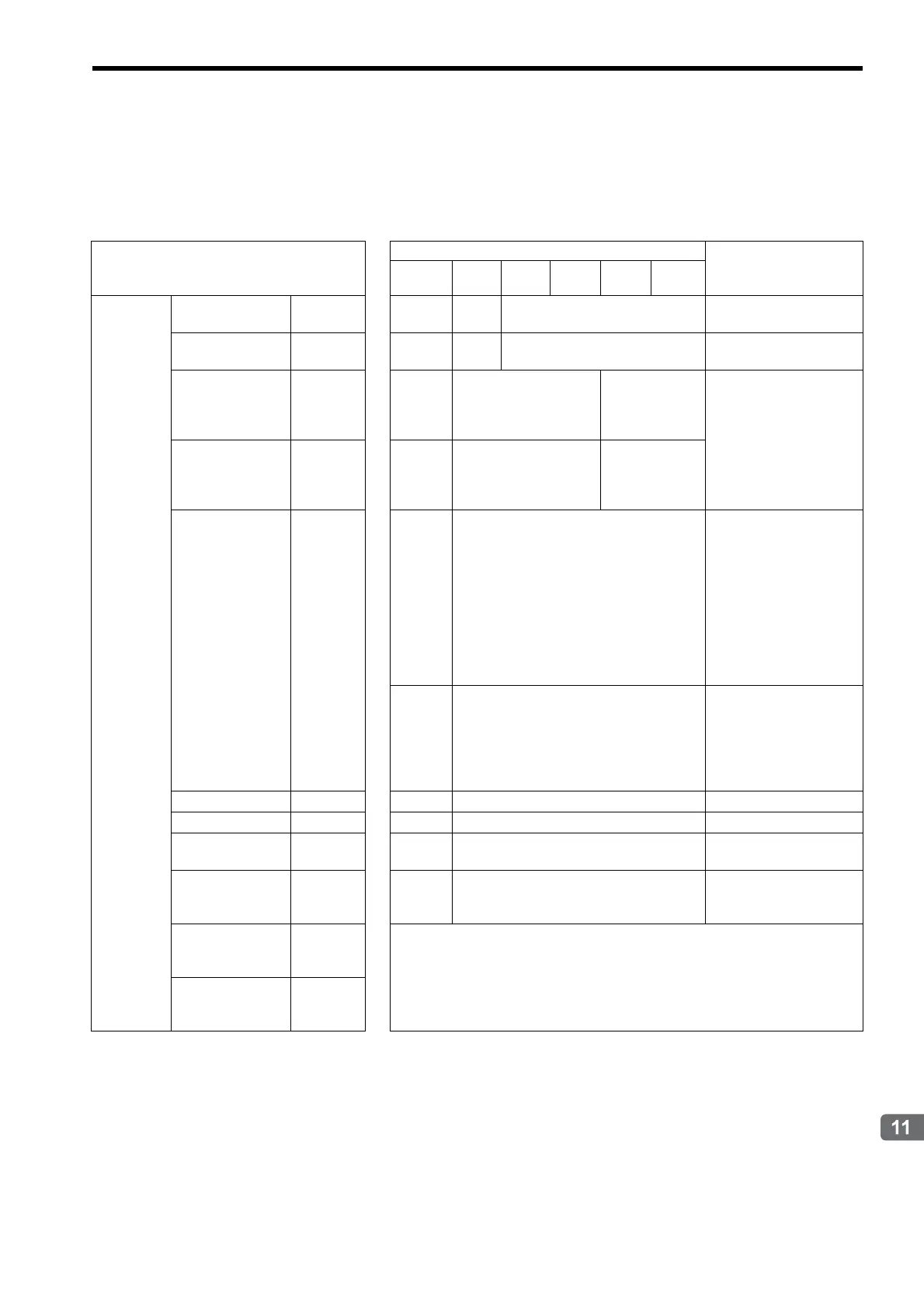
A special care must be taken for the parameters listed in the table below because the Machine Controller parameter set-
tings in the left table below are automatically written to the SERVOPACK parameters given in the right table below
when the Machine Controller starts executing a motion command.
* 1. The parameters are written when User Constants Self-writing Function is enabled at bit A of fixed parameter 1 in
the Machine Controller.
* 2. When Pn833.0 is set to 0, Pn80B will be updated. When Pn833.0 is set to 1, Pn836 will be updated.
* 3. When Pn833.0 is set to 0, Pn80E will be updated. When Pn833.0 is set to 1, Pn83C will be updated.
MP2000 Series Machine Controller
SERVOPACK
Trigger Command
SGD-N,
SGDB-N
NS100 NS115 SGDS SGDV SGD7S
Setting
Parameters
Latch Zone Lower
Limit Setting
OL2A
→
- - Pn822
EX_POSING
Latch Zone Upper
Limit Setting
OL2C
→
- - Pn820
EX_POSING
Straight Line Ac-
celeration/Accel-
eration Time
Constant
OL36
→
Cn-0020
Pn80B
*1
Pn80B/Pn836
*2
POSING, EX_POSING,
ZRET, FEED, STEP
Only when DEN =
ON (when pulse dis-
tribution has been
completed)
Straight Line De-
celeration/Decel-
eration Time
Constant
OL38
→
-
Pn80E
*1
Pn80E/Pn83C
*3
Filter Time Con-
stant
OW3A
Cn-002E
Pn811
*1
POSING, EX_POSING,
ZRET, FEED, STEP
Only when DEN =
ON (when pulse dis-
tribution has been
completed)
When “None” or
“Moving Average
Filter” is selected for
filter type.
→
Cn-0026
Pn812
*1
POSING, EX_POSING,
ZRET, FEED, STEP
Only when DEN =
ON (when pulse dis-
tribution has been
completed.)
Approach Speed OL3E
→
Cn-0022 Pn817
ZRET
Creep Rate OL40
→
Cn-0023 Pn818
ZRET
Zero Point Return
Travel Distance
OL42
→
Cn-0028 Pn819
ZRET
External Position-
ing Final Travel
Distance
OL46
→
Cn-002B Pn814
EX_POSING and ZRET
Forward Outside
Limiting Torque/
Thrust Input
OW00,
Bit 8
→
The settings are enabled when the Servo is turned ON or a move command is sent.
Reverse Outside
Limiting Torque/
Thrust Input
OW00,
Bits9
→
 Loading...
Loading...









