11.6 Parameters That Are Automatically Updated
11.6.5 Parameters Updated during Self-configuration
11-26
11.6.5 Parameters Updated during Self-configuration
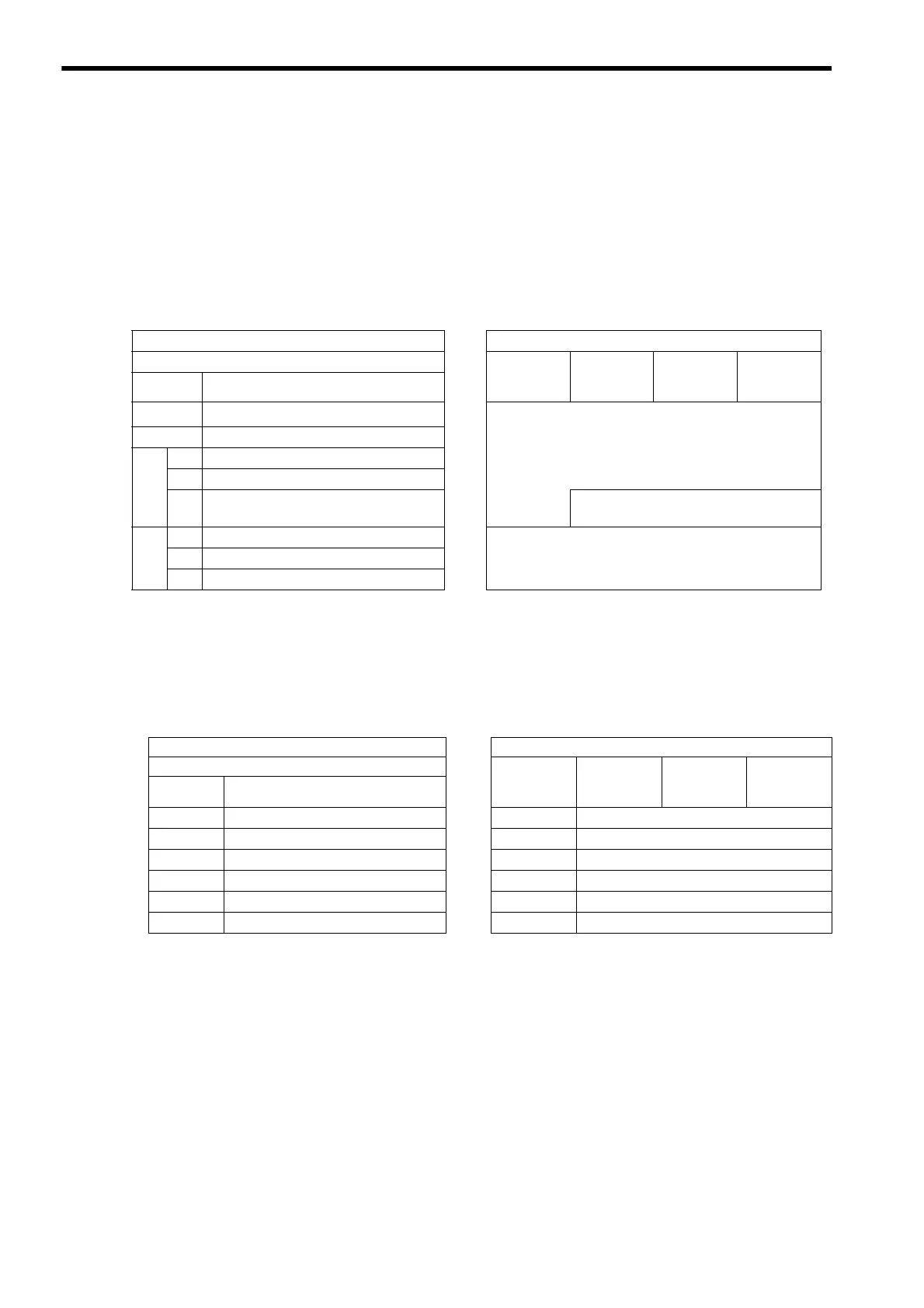
( 1 ) Motion Parameters
The motion parameters for each axis are set as shown below according to information from each SERVOPACK when
self-configuration is executed. Some parameters are written to the SERVOPACK’s RAM.
[ a ] Motion Fixed Parameters
SERVOPACK to Machine Controller
The above processing is not performed when the axis has been set.
The default settings are used for all those parameters not listed above.
*The Motor Type Selection is written to the Motor Type on the upper right of the SVB Definition Window.
[ b ] Motion Setting Parameters
SERVOPACK to Machine Controller
The above processing is not performed when the axis has been set.
The default settings are used for all those parameters not listed above.
MP2000 Series Machine Controller SERVOPACK
Fixed Parameters
SGD-N,
SGDB-N
SGDH +
NS100
SGDH+
NS115
SGDS,
SGDV, or
SGD7S
No. Name
Motor Type Selection
*
←
Depends on the specifications of the connected Servomotor.
30
Encoder Selection ←
Rotary
34
Rated Motor Speed ←
36
Number of Pulses per Motor Rotation ←
38
Maximum Number of Absolute Encoder
Turns Rotation
← Pn205
Linear
6
Linear Scale Pitch ←
Depends on the connected servomotor.
34
Rated Motor Speed ←
36
Number of Pulse per Linear Scale Pitch ←
MP2000 Series Machine Controller SERVOPACK
Setting Parameters
SGD-N,
SGDB-N
SGDH +
NS100
SGDH +
NS115
SGDS,
SGDV, or
SGD7S
Address Name
OW2E
Position Loop Gain ← Cn-001A Pn102
OW2F
Speed Loop Gain ← Cn-0004 Pn100
OW30
Speed Feed Forward Amends ← Cn-001D Pn109
OW32
Position Integration Time Constant ←− Pn11F
OW34
Speed Integration Time Constant ← Cn-0005 Pn101
OW3A
Filter Time Constant ← Cn-0026 Pn812
 Loading...
Loading...









