6.2 Motion Command Details
6.2.21 Absolute Encoder Reset (ABS_RST)
6-78
6.2.21 Absolute Encoder Reset (ABS_RST)
The ABS_RST command initializes the absolute encoder via MECHATROLINK.
Initialization of the absolute encoder is required in the following cases.
• Before initial operation of a machine
• When the alarm A.81 “Encoder Backup Alarm” has occurred.
• When the alarm A.82 “Encoder Checksum Error” has occurred.
The ABS_RST command is valid for Σ-II, Σ-III, Σ-V, and Σ-7 Series SERVOPACKs with absolute encoders. A com-
mand error will occur if the ABS_RST command is executed for a Σ-I Series SERVOPACK. A command error will
occur if the ABS_RST command is executed for a Σ-I Series SERVOPACK. A command error will also occur if the
ABS_RST command is executed when an incremental encoder is being used with a Σ-II, Σ-III, Σ-V, or Σ-7 Series
SERVOPACK (even if it is being used as an absolute encoder).
( 1 ) Executing/Operating Procedure
1.
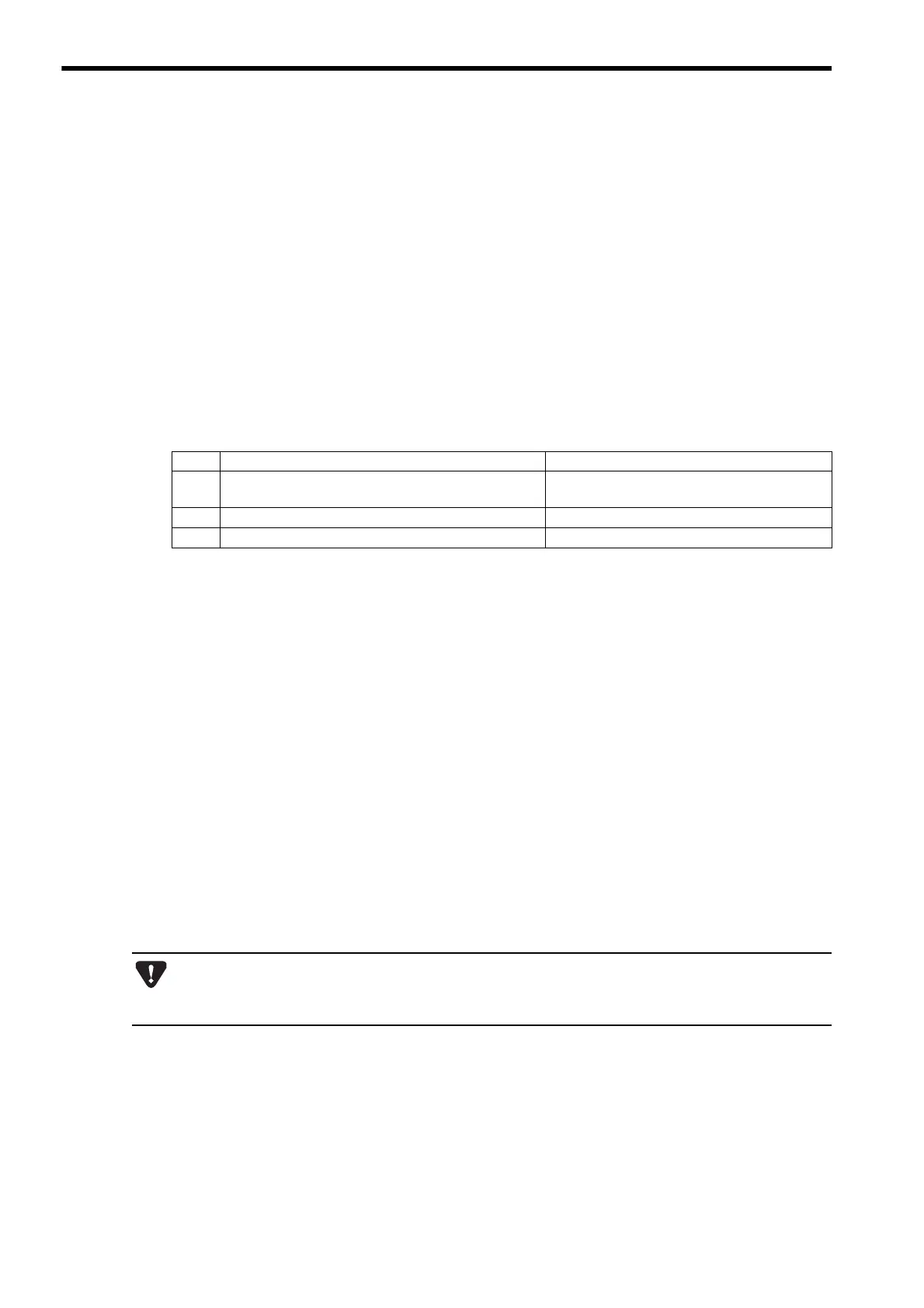
Check to see if all the following conditions are satisfied.
If there is an Encoder Backup Alarm or Encoder Checksum Alarm in the SERVOPACK, communications can-
not be synchronized just by turning ON the power supply to the controller. Use the Alarm Clear bit (OW00,
bit F) to synchronize communications.
2.
Set OW08 to 22 to execute the ABS_RST motion command.
The ABS_RST command will clear any alarms that have occurred and resets the multiturn data in the absolute
encoder to 0.
IW08 will be 22 and IW09 Bit0 will turn ON during command processing.
IW09 bit 0, IW09 bit 3, and IW00 bit 0 will turn OFF and IW09 bit 7 will turn ON when the
command processing has been completed.
3.
Set OW08 to 0 to execute the NOP motion command to initialize the absolute encoder.
When using an SGD7S, SGDV, or SGDH+NS115 SERVOPACK:
Always turn OFF the power to the SERVOPACK and then turn it ON again after executing the ABS_RST command.
When using an SGDS SERVOPACK:
It is not necessary to turn OFF the power to the SERVOPACK and then turn it ON again after executing the
ABS_RST command. Just use the Alarm Clear bit (OW00, bit F) to synchronize communications. If the
ABS_RST command is executed while there is an Encoder Backup Alarm (A.81), the alarm clear operation will have
to be performed twice before communications can be synchronized again.
( 2 ) Holding and Aborting
The Holds a Command bit (OW09, bit 0) and the Interrupt a Command bit (OW09, bit 1) cannot be used.
Processing will be canceled if a communication error occurs while the command is being executed and a command
error will occur.
SGDV and SGDH+ NS115 SERVOPACKs need to be restarted after this function is executed.
SGDS SERVOPACKs, however, can be used after resetting the absolute encoder and clearing the alarm.
No. Execution Conditions Confirmation Method
1
Communication with the SERVOPACK must be synchro-
nized.
IW00, bit 0 is ON.
2 The Servo OFF condition. IW00, bit 1 is OFF.
3 Motion command execution has been completed. IW08 is 0, and IW09, bit 0 is OFF.
When the absolute encoder has been reset, communication will be disconnected between the Machine
Controller and the SERVOPACK. The zero point setting completed and zero point return completed status
will thus be cleared. Use the Alarm Clear bit (OW
00, bit F) after executing the ABS_RST command, re-
establish communications, and then execute the ZRET or ZSET command.
 Loading...
Loading...









