10.4 Motion Parameter Details
10.4.2 Setting Parameter List
10-30
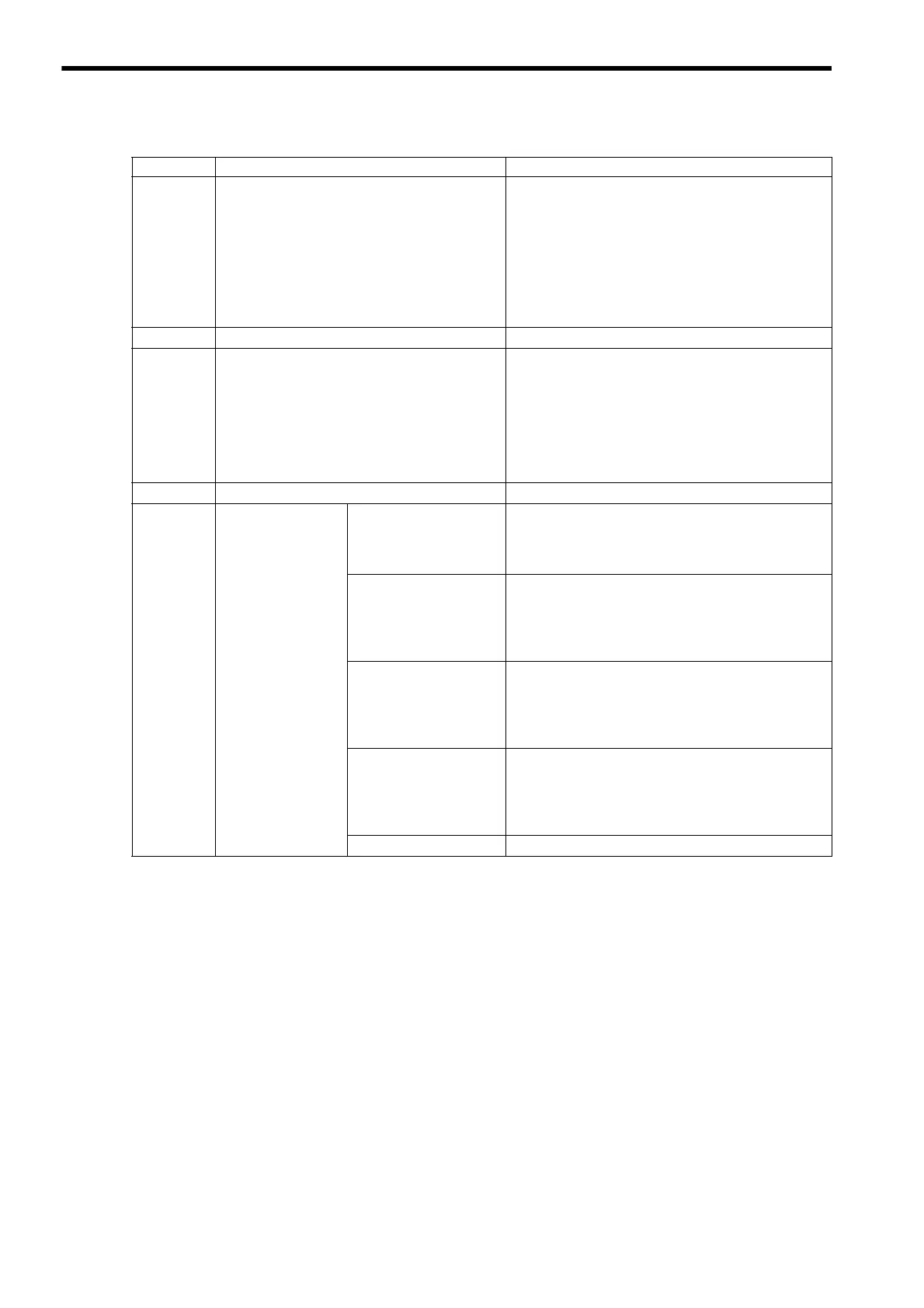
OW08
Motion Commands
(Refer to 10.3.3 Command Details for details.)
00: No Command
01: Inverter Drive Control
02: Read User Constant
03: Write User Constant
04: Alarm Monitor
05: Alarm History Monitor
06: User Constant RAM Writing
07: User Constant EEPROM Writing
08: Transmission Reference
OW09
−
Reserved by the system
OW0A
Subcommands
(Refer to 10.3.4 Subcommand Details for de-
tails.)
00: No Command
01: Inverter I/O Control
02: Read User Constant
03: Write User Constant
04: Alarm Monitor
05: Alarm History Monitor
08: Transmission Reference
09: Read Fixed Parameters
OW0B
−
Reserved by the system
OW0C
Output Data Option
Selection
Bit 0: Torque Compensa-
tion
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Torque Compensation (OW13) will be validated
when the command Inverter Drive Control is executed.
Bit 1: Multi-function Ana-
log Output FM
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Analog Output FM (OW14) will be
validated when the command Inverter Drive Control is
executed.
Bit 2: Multi-function Ana-
log Output AM
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Analog Output AM (OW15) will be
validated when the command Inverter Drive Control is
executed.
Bit 3: Multi-function Ter-
minal Output
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Terminal Output (OW16) will be val-
idated when the command Inverter Drive Control is exe-
cuted.
Bits 4 to F
Reserved by the system
(cont’d)
Register No. Name Contents
 Loading...
Loading...









