8.4 Speed Control
8.4.1 Motion Parameters for Speed Control
8-21
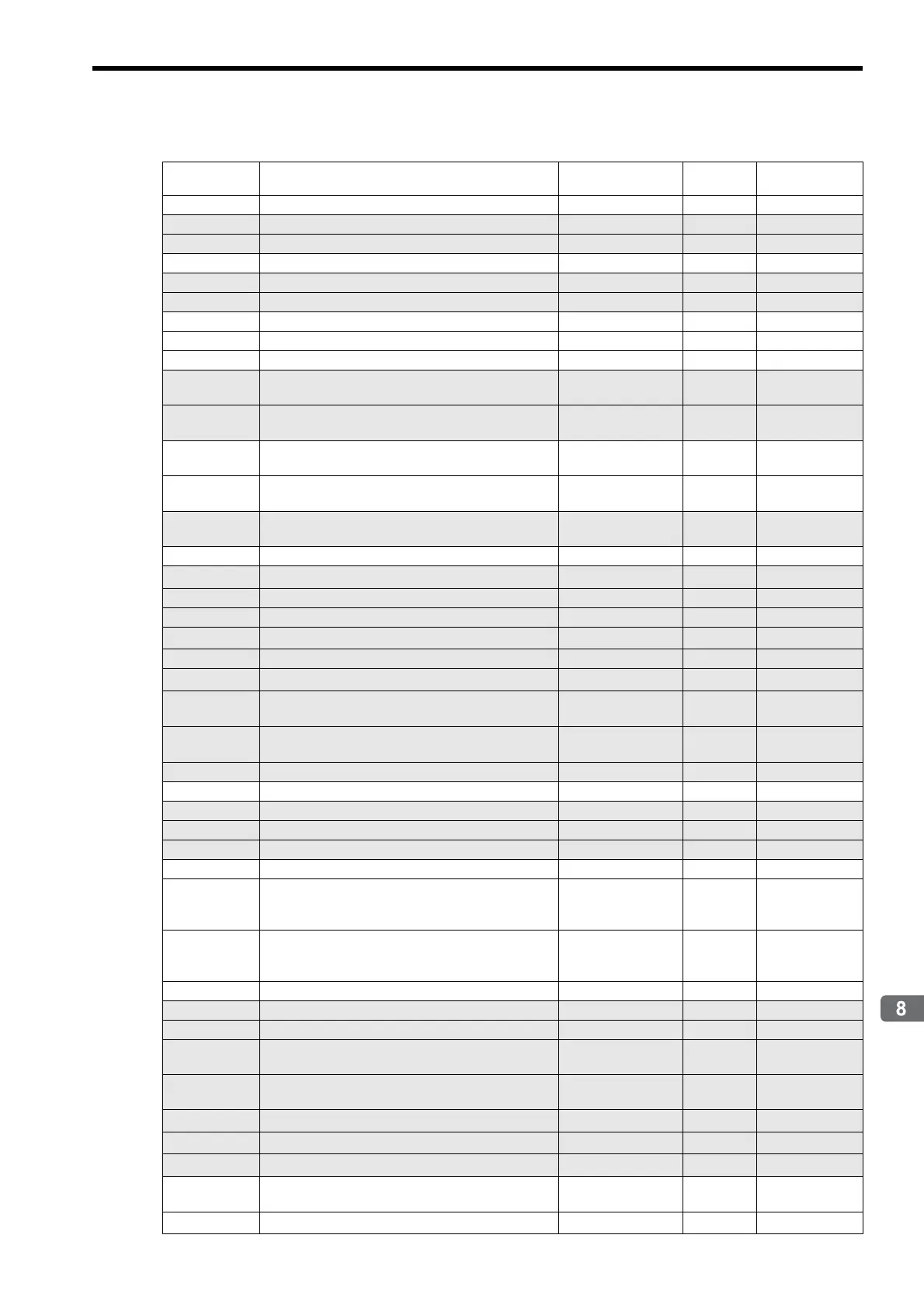
( 2 ) Setting Parameters
No. Name Setting Unit
Default
Value
Setting Range
OW00
RUN Command Setting
− 0000h Bit setting
OW01
Mode Setting 1
− 0000h Bit setting
OW02
Mode Setting 2
− 0000h Bit setting
OW03
Function Setting 1
− 0011h Bit setting
OW04
Function Setting 2
− 0033h Bit setting
OW05
Function Setting 3
− 0000h Bit setting
OW08
Motion Command
− 00 to 39
OW09
Motion Command Control Flag
− 0000h Bit setting
OW0A
Motion Subcommand
− 0 0 to 65535
OL0C
Torque/Thrust Reference Setting
Depends on torque
unit.
0
-2
31
to 2
31
−1
OW0E
Speed Limit Setting at the Torque/Thrust Refer-
ence
0.01% 15000 -32768 to 32767
OL10
Speed Reference Setting
Depends on speed
unit.
3000
-2
31
to 2
31
−1
OL14
Positive Side Limiting Torque/Thrust Setting at
the Speed Reference
Depends on torque
unit.
30000
-2
31
to 2
31
−1
OL16
Secondly Speed Compensation
Depends on speed
unit.
0
-2
31
to 2
31
−1
OW18
Override
0.01% 10000 0 to 32767
OL1C
Position Reference Setting
Reference unit 0
-2
31
to 2
31
−1
OL1E
Width of Positioning Completion
Reference unit 100 0 to 65535
OL20
NEAR Signal Output Width
Reference unit 0 0 to 65535
OL22
Error Count Alarm Detection
Reference unit
2
31
−1 0 to 2
31
−1
OW26
Positioning Completion Check Time
ms 0 0 to 65535
OL28
Phase Correction Setting
Reference unit 0
-2
31
to 2
31
−1
OL2A
Latch Zone Lower Limit Setting (for External Po-
sitioning)
Reference unit
-2
31
-2
31
to 2
31
−1
OL2C
Latch Zone Upper Limit Setting (for External Po-
sitioning)
Reference unit
2
31
−1 -2
31
to 2
31
−1
OW2E
Position Loop Gain
0.1/s 300 0 to 32767
OW2F
Speed Loop Gain
Hz 40 1 to 2000
OW30
Speed Feed Forward Amends
0.01% 0 0 to 32767
OW31
Speed Amends
0.01% 0 -32768 to 32767
OW32
Position Integration Time Constant
ms 0 0 to 32767
OW34
Speed Integration Time Constant
0.01 ms 2000 15 to 65535
OL36
Straight Line Acceleration/Acceleration Time
Constant
Depends on acceler-
ation/deceleration
speed unit.
0
0 to 2
31
−1
OL38
Straight Line Deceleration/Deceleration Time
Constant
Depends on acceler-
ation/deceleration
speed unit.
0
0 to 2
31
−1
OW3A
Filter Time Constant
0.1 ms 0 0 to 65535
OW3C
Zero Point Return Method
− 0 0 to 19
OW3D
Width of Starting Point Position Output
Reference unit 100 0 to 65535
OL3E
Approach Speed
Depends on speed
unit.
1000
-2
31
to 2
31
−1
OL40
Creep Rate
Depends on speed
unit.
500
-2
31
to 2
31
−1
OL42
Zero Point Return Travel Distance
Reference unit 0
-2
31
to 2
31
−1
OL44
STEP Travel Distance
Reference unit 1000
0 to 2
31
−1
OL46
External Positioning Final Travel Distance
Reference unit 0
-2
31
to 2
31
−1
OL48
Zero Point Position in Machine Coordinate Sys-
tem Offset
Reference unit 0
-2
31
to 2
31
−1
OL4A
Work Coordinate System Offset
Reference unit 0
-2
31
to 2
31
−1
 Loading...
Loading...









