11.1 Controlling Vertical Axes
11.1.2 Connections to Σ-II Series SGDH SERVOPACKs, Σ-III Series SGDS SERVOPACKs, Σ-V Series SGDV SERVOPACKs, and Σ-7
Series SGD7S SERVOPACKs
11-5
Pn507
Brake ON Timing when Motor Run-
ning
min
−1
0 to 10000 100
Speed, torque,
position control
Pn508
10 ms 0 to 100 50
Speed, torque,
position control
Details
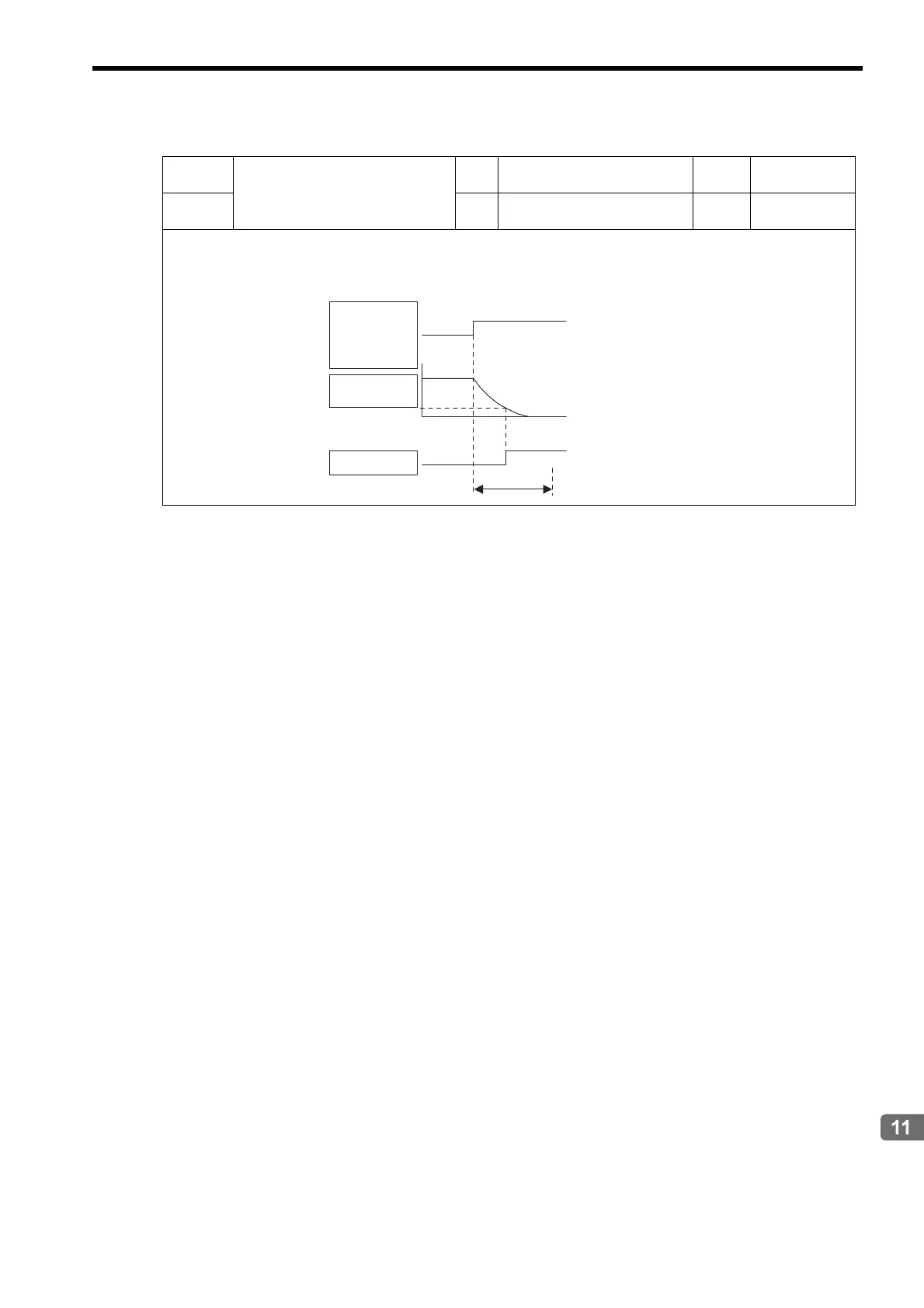
Pn507: Speed Level for BK Signal Output when Motor Running
Pn508: Timing of BK Signal Output when Motor Running
These settings are used to set the timing for applying the brake when the Servo turns OFF due to an /S-ON input signal or alarm.
(cont’d)
Motor speed
Pn507
/BK output
Servo ON
Servo OFF
Pn508
Brake holding
/S-ON input or
alarm occurred.
Power OFF
Stop with dynamic
brake or by coasting
(Pn001.0)
Brake
released
The brake on the Servomotor is
designed as a holding brake and it
must be applied only after the motor
has stopped. Adjust this parameter
while observing machine operation.
 Loading...
Loading...









