8 Fully-closed Loop Control
8.3.1 Motor Rotation Direction
8-16
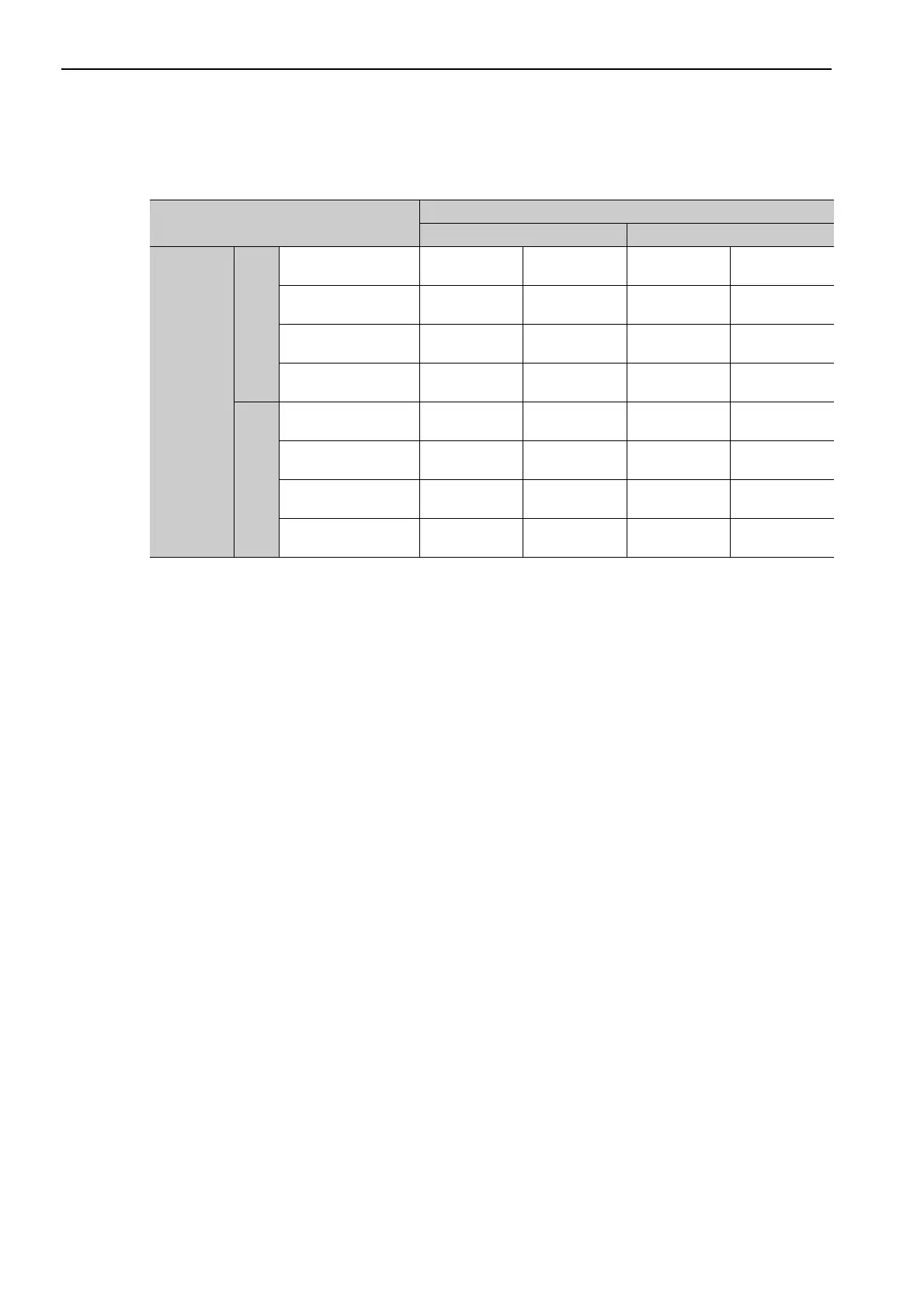
(3) Relation between Motor Rotation Direction and External Encoder Pulse Phases
Refer to the table below.
• The output pulses are phase-B advanced if the motor is turning forward regardless of the setting in Pn000.0.
Parameter
Pn002.3 (External Encoder Usage)
1 3
Pn000.0
(Motor
rotation
direction)
0
Reference
direction
Forward
reference
Reverse
reference
Forward
reference
Reverse
reference
Motor rotation
direction
CCW CW CCW CW
External encoder
output
cos lead sin lead sin lead cos lead
Encoder output pulse
Phase B
lead
Phase A
lead
Phase B
lead
Phase A
lead
1
Reference
direction
Forward
reference
Reverse
reference
Forward
reference
Reverse
reference
Motor rotation
direction
CW CCW CW CCW
External encoder
output
sin lead cos lead cos lead sin lead
Encoder output pulse
Phase B
lead
Phase A
lead
Phase B
lead
Phase A
lead