Drive-to-drive link 351
Types of messaging
Each drive on the link has a unique node address allowing point-to-point
communication between two drives. The node address 0 is automatically assigned to
the master drive; on other drives, the node address is defined by parameter 57.03
Node address.
Multicast addressing is supported, allowing the composition of groups of drives. Data
sent to a multicast address is received by all drives that have that address. A
multicast group can consist of 1…62 drives.
In broadcast messaging, data can be sent to all drives (actually, all followers) on the
link.
Both master-to-follower(s) and follower-to-follower(s) communication is supported. A
follower can send one message to another follower (or a group of followers) after
receiving a token message from the master.
Master point-to-point messaging
In this type of messaging, the master sends one dataset (LocalDsNr) from its own
dataset table to the follower’s. TargetNode stands for the node address of the
follower; RemoteDsNr specifies the target dataset number.
The follower responds by returning the contents of the next dataset. The response is
stored into dataset LocalDsNr+1 in the master.
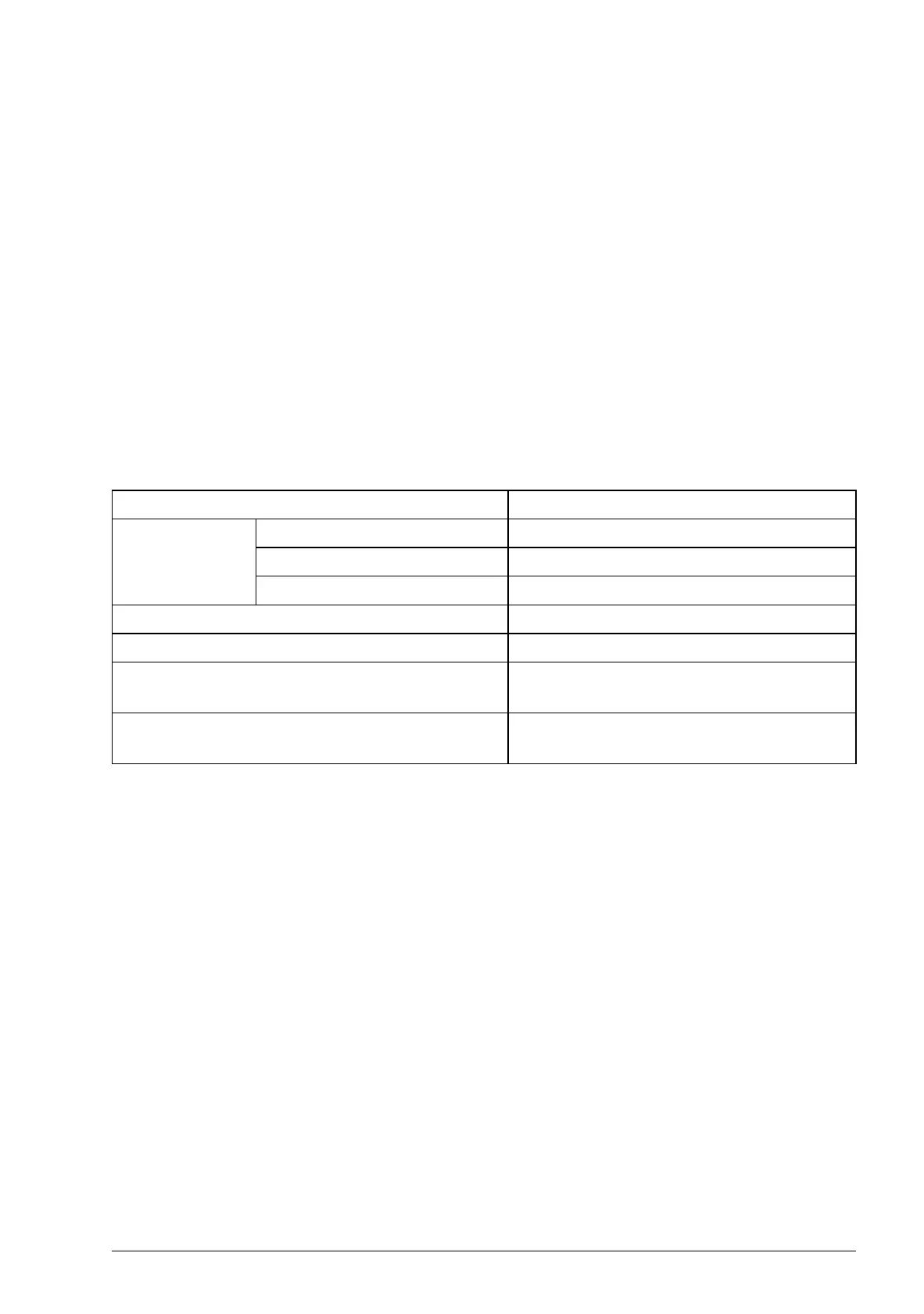
Type of messaging Note
Point-to-point
Master point-to-point Supported only at master
Read remote Supported only at master
Follower point-to-point Supported only at followers
Standard multicast For both master and followers
Broadcast For both master and followers
Token message for follower-to-follower
communication
–
Chained multicast
Supported only for drive-to-drive reference
1 and control word