72 Program features
The PID control macro can be activated from the control panel main menu by
selecting ASSISTANTS – Firmware assistants – Application Macro – PID control. See
also page 94.
Mechanical brake control
A mechanical brake can be used for holding the motor and driven machinery at zero
speed when the drive is stopped, or not powered.
Parameters 03.15 Brake torq mem and 03.16 Brake command show the torque value
stored when the brake close command is issued and the value of the brake command
respectively.
Settings
Parameter group 42 Mech brake ctrl (page 220).
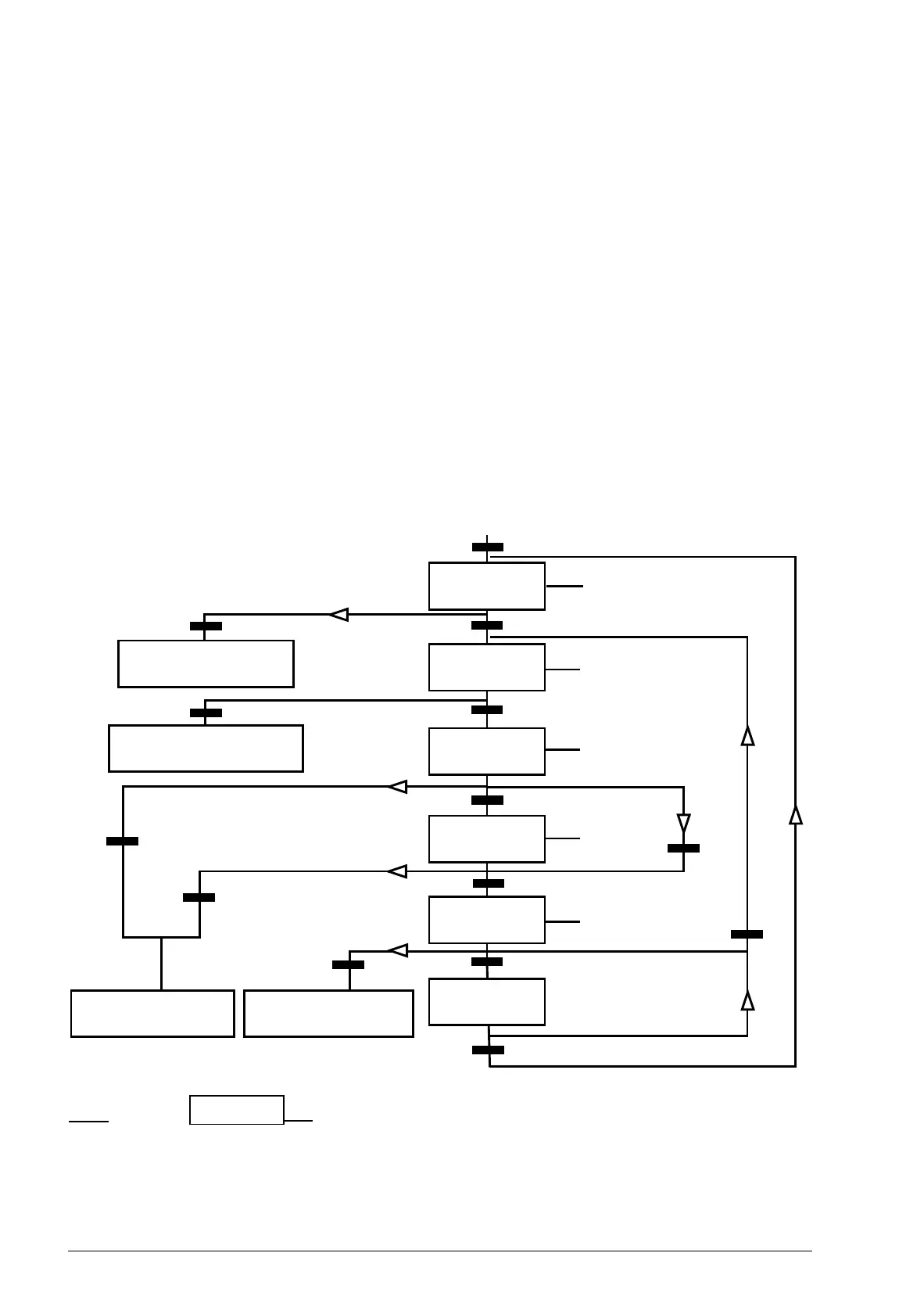
State (Symbol )
- NN: State name
- W/X/Y/Z: State outputs/operations
W: 1 = Brake open command is active. 0 = Brake close command is active. (Controlled
through selected digital/relay output with signal 03.16 Brake command.)
BSM = Brake State Machine
* Depending on setting of parameter
42.12 Brake fault func
0/0/1/1
0/1/1/1
1/1/0/0
1/1/0/0
0/1/1/0
5)
7)13)
12)
11)
10)
9)
6)
1)
2)
3)
4)
From any state
BSM
STOPPED
BSM
START
OPEN
BRAKE
RELEASE
RAMP
CLOSE
BRAKE
Fault/Alarm*
BRAKE NOT CLOSED
Fault/Alarm*
BRAKE NOT OPEN
Fault/Alarm*
BRAKE NOT CLOSED
Fault/Alarm*
BRAKE START TORQUE
8)
EXTENDED
RUN
14)