Robot Specifications
Adept Cobra s600/s800 Robot User’s Guide, Rev H 115
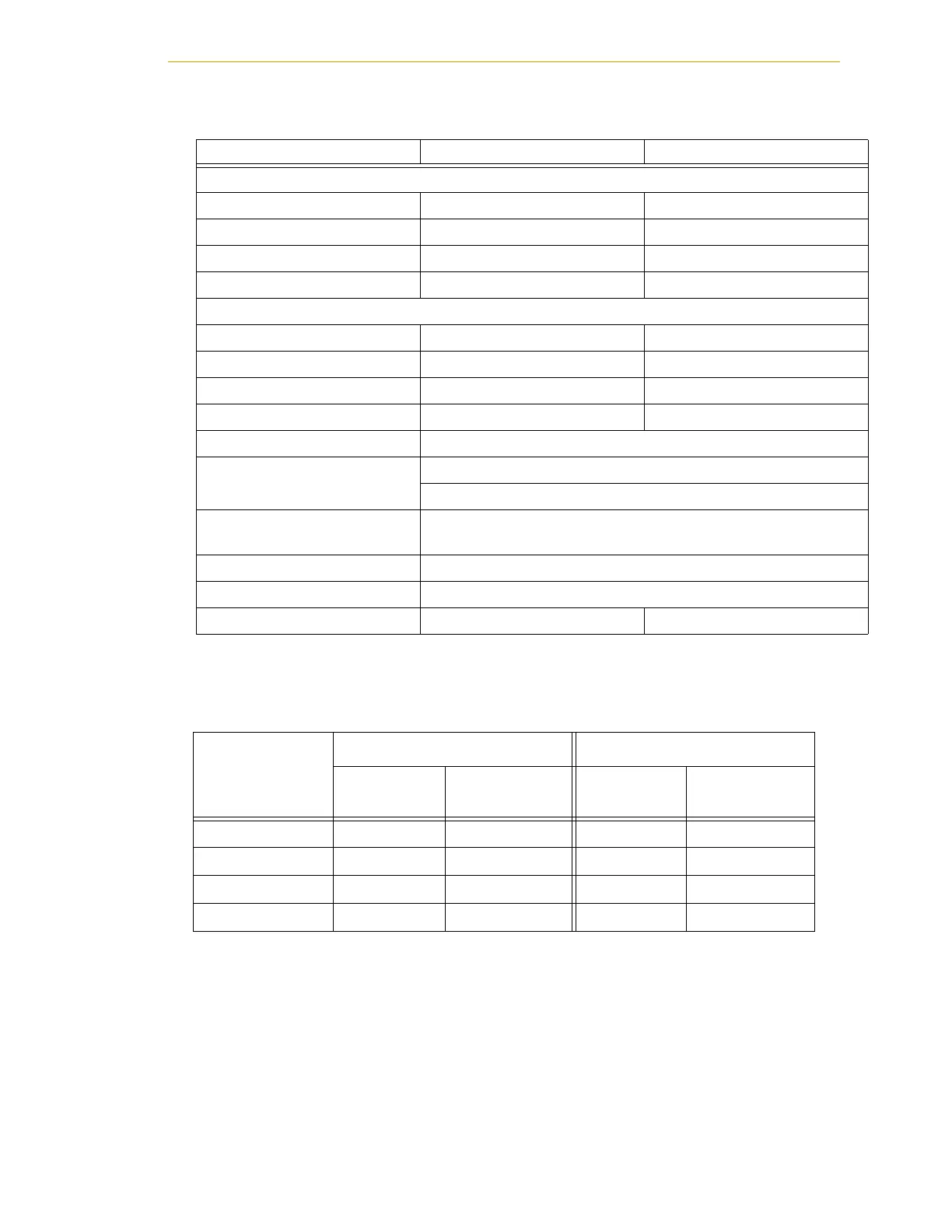
Joint Range
Joint 1 ±105° ±105°
Joint 2 ±150° ±157.5°
Joint 3 210 mm (8.3 in.) 210 mm (8.3 in.)
Joint 4 ±360° ±360°
Joint Speed (maximum)
Joint 1 386°/sec 386°/sec
Joint 2 720°/sec 720°/sec
Joint 3 1,100 mm/sec (43 in/sec) 1,100 mm/sec (43 in/sec)
Joint 4 1200°/sec 1200°/sec
Encoder type Absolute
Robot Brakes Joints 1, 2, and 4: Dynamic
Joint 3: Electric
Airline pass-through
(quantity)
6 mm diameter (2), 4 mm diameter (3)
Electrical pass-through 24 conductors (12 twisted pair)
DeviceNet pass-through One available
Weight (without options) 41 kg (90 lb) 43 kg (95 lb)
a
Specifications subject to change without notice.
Table 8-3. Softstop and Hardstop Specifications
Joint
Cobra s600 Cobra s800
Softstop
Hardstop –
Approximate
Softstop
Hardstop –
Approximate
Joint 1 ± 105° ± 108° ± 105° ± 108°
Joint 2 ± 150° ± 151° ± 157.5° ± 160°
Joint 3 0 to 210 mm -5 to 215 mm 0 to 210 mm -5 to 215 mm
Joint 4 ± 360° not applicable ± 360° not applicable
Table 8-2. Adept Cobra s600/s800 Robot Specifications
a
(Continued)
Description s600 Robot s800 Robot
 Loading...
Loading...

